SONAR-INFO-p98
IL SONAR DEL SILURO FILOGUIDATO 1)Generalità 2)Sulla struttura di un vettore filoguidato con l'ogiva acustica 3)Indicazioni di massima sulle basi idrofoniche dell'ogiva acustica 4)Tecniche per la formazione dei fasci preformati 5)Giustificazione teorica della portata di scoperta dell'ogiva 6)Considerazioni in merito al calcolo della portata
L'ogiva acustica
La strategia implementata nei siluri filoguidati prevede il controllo, via cavo, del loro percorso
per un lungo tratto di mare, circa 20000 m, per l'indirizzamento del vettore sul
bersaglio in un intorno di raggio non inferiore a 1500 metri; raggiunto il limite di distanza prevista
il siluro si sgancia dalla filoguida ed inizia in modo autonomo, con il proprio sonar, la localizzazione precisa del
bersaglio con la componente passiva e/o quella attiva in base alla programmazione impostata.
Dato che i bersagli possono essere indifferentemente navi di superficie che sommergibili
la localizzazione prevede la determinazione precisa, sia della direzione
del bersaglio nel piano orizzontale, che dell'angolo tra l'orizzonte e la congiungente
siluro-bersaglio nel piano verticale.
Questa duplice misura è possibile grazie alla struttura ogivale della testa del siluro che consente
la realizzazione di due sistemi di fasci preformati ortogonali tra loro.
Un siluro tipico con le caratteristiche indicate in precedenza è riportato in figura 1,
dove l'ogiva acustica è visibile sulla sinistra:

La fotografia mostra il vettore A184 della soc. WASS con l'ogiva acustica derivata dai prototipi
AG67 USEA:
I prototipi AG67, progettati e sviluppati a suo tempo dalla Soc. USEA, erano comprensivi di
basi acustiche, preamplificatori, trasmettitori e ricevitori a fasci preformati; tutta l'elettronica
del sonar era contenuta all'interno dell'ogiva.
La sperimentazione dei prototipi fu condotta con un'ogiva acustica montata, con apposito
fondello-supporto, sulla parte superiore di un sommergibile operativo; con apposito cavo i segnali
di emissione e ricezione venivano convogliati in apposito locale del battello per i rilievi del caso.
L'ogiva acustica, schematizzata in figura 2, supporta due basi idrofoniche ciascuna
posizionata sulle circonferenze giacenti su piani ortogonali del supporto:
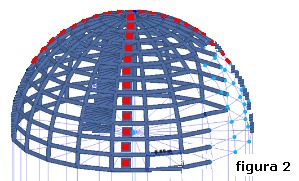
I trasduttori delle due basi; per il piano orizzontale e per quello verticale sono evidenziati
in rosso; la base orizzontale è estesa su tutto l'arco dell'ogiva mentre quella verticale ne occupa
soltanto una porzione.
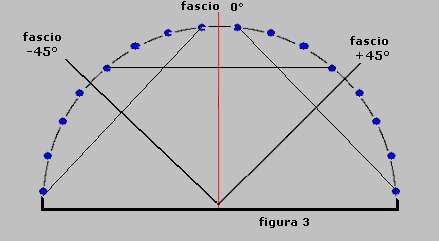
-La ricezione della base orizzontale, per generare fasci preformati aventi i lobi con le stesse caratteristiche su
tutte le direzioni, è limitata in un arco di circa +/- 45° rispetto all'asse longitudinale del vettore.
-La ricezione della base verticale, date le geometrie nel campo, è limitata in un arco di circa +/- 10°.
Con ciascuna base vengono generati fasci preformati indipendenti per ottenere i dati angolari, sul piano
orizzontale e su quello verticale, necessari per l'autoguida del vettore verso il bersaglio.
In figura 3 è tracciata la base orizzontale dell'ogiva per evidenziare l'arco utile con il quale si compongono i fasci preformati.
In questo modo tutti i fasci compresi tra +/- 45° hanno le stesse caratteristiche di guadagno e di
sensibilità; date le dimensioni dell'ogiva tutte le lunghezze delle corde, accolgienti la proiezione degli idrofoni che formano
un fascio, sono dell'ordine di 35 cm. Nella figura il numero dei sensori non corrisponde, volutamente, a quello reale.
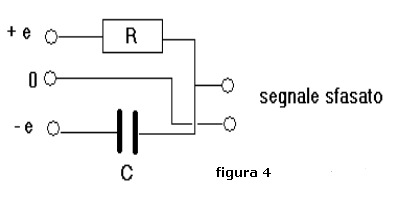
I fasci preformati progettati per i prototipi AG67 prevedevano il rifasamento delle tensioni
generate dagli idrofoni e non la loro rimessa in coerenza; ciò in virtù del fatto che il sonar
doveva operare prevalentemente in attivo, con impulsi di frequenza nota (salvo il Doppler), e in
passivo in banda estremamente stretta.
Gli sfasamenti calcolati erano realizzati tramite le cellule R-C riportate in figura 4 secondo i
criteri di progetto esposti nella pagina p74 del sito.
A seguito dell'industrializzazione dell'ogiva operata dalla Soc.SEPA (gruppo FIAT) la struttura
dei fasci rimase praticamente identica salvo una notevole riduzione dei volumi di tutta l'elettronica.
Non è nota allo scrivente la struttura attuale dell'ogiva del vettore A184; I fasci possono essere
realizzati, sia con il metodo indicato, sia con sistemi numerici su processori veloci che richiedono
però la digitalizzazione delle tensioni idrofoniche.
Per il particolare modo d'impiego il sonar dell'ogiva deve consentire la portata di scoperta voluta,
indicata in par.1) in 1500 metri, fissate, di massima, le seguenti probabilità di rivelazione e falso allarme:
-probabilità di rivelare il bersaglio a 1500 m : Priv = 99%
-probabilità che si verifichi un falso allarme alla distanza di 1500 m: Pfa = 0.01 %
Con tale premessa possiamo verificare come una serie di variabili acustiche, giustificate da ipotetiche
condizioni operative, possano soddisfare l'assunto d'inizio paragrafo.
L'operazione di calcolo può essere impostata con il calcolatore SONARMATH disponibile a pagina p6.
Supponiamo che la serie delle variabili acustiche sia quella di seguito riportata:
-a) propagazione = sferica (assunto corretto data la breve distanza del campo operativo)
-b) frequenza di emissione fo = 30000 Hz (date le dimensioni della base e la modesta lunghezza del campo)
-c) banda di ricezione bw = 1300 Hz ( la minima possibile per ricevere l'impulso +/- il Doppler)
-d) livello indice d'emissione SL = 210 dB/μPa (da computazioni iterative)
-e) livello del rumore del vettore più il rumore del mare a forza 2: NL = 57 dB/μPa/Hz (da rilievi sul campo)
-f) guadagno di direttività (orizz. + vert.) = 23 dB (dipendente da fo e dalle dimensioni della base)
-g) durata impulso d'emissione t = 2.5 mSec. (per ridurre al massimo la riverberazione)
-h) parametro (d) funzione di Priv e Pfa : d = 37 (da curve ROC di p80, dati Priv = 99% e Pfa = 0.01%)
-i) forza del bersaglio TS = 15 dB (dato per bersaglio standard)
Dopo l'inserzione dei dati nel SONORMATH la schermata di calcolo è mostrata in figura 5:
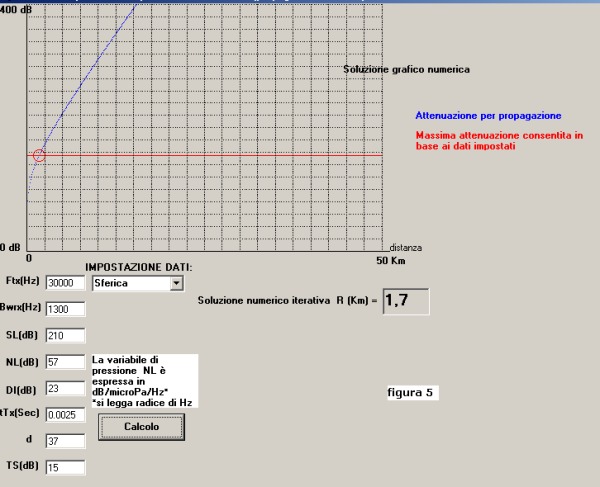
Il risultato della computazione indica una portata di 1700 metri, di poco superiore a quella dichiarata
per il vettore, che verifica le prestazioni dell'ogiva.
Le variabili utilizzate per il computo sviluppato in 5) possono essere divise in tre gruppi:
-I° variabili ambientali di previsione:
a) propagazione = sferica
e) rumore del mare e del vettore NL = 57 dB/μPa/Hz
i) forza del bersaglio TS = 15 dB
-II° variabili definite in sede di progetto e non facilmente modificabili:
b) frequenza di emissione fo = 30000 Hz
c) banda di ricezione bw = 1300 Hz
f) guadagno di direttività (orizz. + vert.) = 23 dB
-III° variabili definite in sede di progetto e facilmente modificabili in fase operativa
d) livello indice d'emissione SL = 210 dB/μPa
g) durata impulso d'emissione t = 2.5 mSec.
h) parametro (d) funzione di Priv e Pfa : d = 37
E' evidente che le incertezze di previsione, relative alle variabili del I° gruppo, non possono che
essere in parte compensate tramite la variazione di quelle del III° gruppo; variazioni che il sonar
dell'ogiva deve eseguire, in modo automatico, affinché si possa garantire, ragionevolmente, la portata di
scoperta voluta.
Le variazioni del III° gruppo possono essere attuate:
d) per il livello indice d'emissione (mediante variazione della potenza elettrica del trasmettitore)
g) per l' impulso d'emissione (mediante aggiustaggio del tempo e/o codfica della forma)
h) parametro (d) funzione di Priv e Pfa (mediante variazione della soglia di rivelazione)