SONAR-INFO-p94
SUI FASCI PREFORMATI 1)Generalità 2)Sulla costruzione dei fasci preformati 3)Uno dei modi per il dimensionamento dei fasci preformati 4)Sul numero dei fasci preformati 5)Sull'interpolazione tra i fasci preformati 6)Nota storica sui problemi tecnologici
Orientamento artificiale delle direttività
In questa pagina riportiamo una sintesi da p2 cap.4 par.4.5 dal titoilo: "Sistemi di fasci preformati";
nel testo saranno inseriti i riferimenti di carattere matematico che il paragrafo originale, per assunto di principio, non
contiene.
Una delle funzioni fondamentali del sonar si concretizza nel sistema dei "fasci preformati".
Il sistema consente la visione simultanea di tutti i bersagli presenti sui 360° dell'orizzonte, compatibilmente
con le condizioni minime valide per la scoperta dei rumori o degli echi dei semoventi e con la forma
e la collocazione della base.
La tecnica dei fasci preformati può essere utilizzata in quattro diversi tipi di configurazioni:
La prima prevede la modifica della caratteristica di direttività naturale di una base idrofonica
rettilinea o ad essa assimilabile, caratteristica che realizza, sul piano orizzontale, la massima
sensibilità di ricezione secondo la perpendicolare alla base stessa (figura 1 -tracciato di sinistra-), in un insieme di direttività (artificiali) ciascuna orientata, in modo permanente,
secondo diverse direzioni stabilite come si evince dalla figura 1 (-tracciato di destra-):
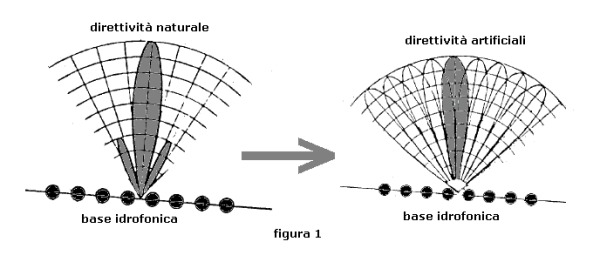
Nella figura 1 sono tracciate ad esempio 8 direttività artificiali ( 8 fasci preformati ) distribuiti
in un generico settore angolare; il guadagno di direttività si riduce mano a mano che i fasci
si scostano dal fascio di direttività naturale; anche i fasci artificiali sono
sviluppati sul piano orizzontale.
I fasci possono essere realizzati con speciali algoritmi su calcolatori veloci che ricevono
in forma numerica le tensione dei singoli idrofoni,
oppure con l'introduzione di "ritardi calibrati" sulle tensioni dei
singoli idrofoni che costituiscono la base; in questi casi gli organi di ritardo possono
essere analogici, digitali a due stati, numerici.
La seconda prevede la modifica della caratteristica di direttività naturale di una base idrofonica
circolare, caratteristica che realizza la massima sensibilità di ricezione secondo la perpendicolare
al piano della base (figura 2 -tracciato di sinistra-), in un insieme di direttività (artificiali)
ciascuna orientata, in modo permanente, sullo stesso piano della base figura 2 (-tracciato di destra-):
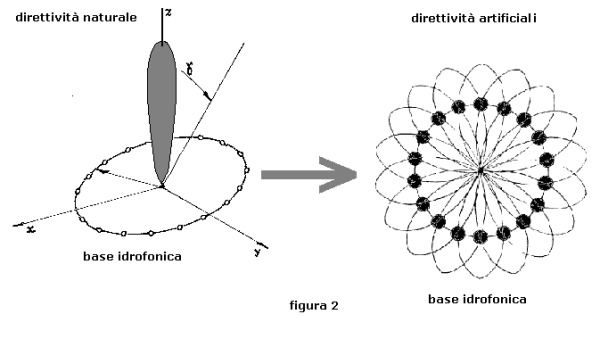
Nella figura 2 (-tracciato di destra-) sono disegnate ad esempio 18 direttività naturali ( 18 fasci preformati ) distribuiti
su tutto l'arco dell'orizzonte; tutti i fasci hanno lo stesso guadagno di direttività.
I fasci possono essere realizzati con speciali algoritmi su calcolatori veloci che ricevono,
in forma numerica le tensione dei singoli idrofoni,
oppure con l'introduzione di "ritardi calibrati" sulle tensioni dei
singoli idrofoni che costituiscono la base; in questi casi gli organi di ritardo possono
essere analogici, digitali a due stati, numerici.
La terza prevede un diverso utilizzo della caratteristica di direttività naturale di una base
idrofonica circolare, caratteristica che realizza la massima sensibilità di ricezione secondo la perpendicolare
al piano della base (figura 2a -tracciato di sinistra-), in un insieme di direttività naturali
ciascuna orientata, in modo permanente, sullo stesso piano della base figura 2a (-tracciato di destra-):
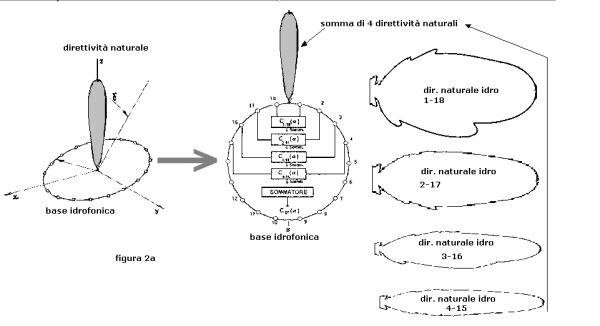
Nella figura 2a è disegnato ad esempio un solo fascio preformato ottenibile dalla somma delle quattro
direttività tracciate a destra, secondo la filosofia FALCON (si veda p4); numerosi fasci preformati possono essere realizzati utilizzando
coppie d'idrofoni i cui assi siano orientati su tutto l'arco dell'orizzonte; tutti i fasci hanno lo stesso guadagno di direttività.
I fasci sono realizzabili con speciali algoritmi su calcolatori normali e circuitazione esterna tradizionale.
La quarta prevede una particolare modifica della caratteristica di direttività naturale di una base
idrofonica circolare o semi ellittica per uso esclusivo nella ricezione di impulsi d'eco o impulsi
da intercettare.
Questi sitemi realizzano fasci preformati rifasando le tensioni degli idrofoni della base e non
ripristinandone la coerenza; non sono pertanto adatti alla ricezione di segnali idrofonici.
Per una discussione dettagliata si rimanda alla pagina p74.
Il caso più semplice che interessa il dimensionamento di un sistema a fasci preformati è relativo ad una base circolare
dato che la struttura di ciascun fascio è identica per tutti gli altri.
Consideriamo la base circolare di figura 3:
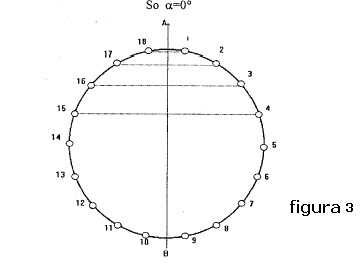
in essa osserviamo la posizione delle singole coppie d'idrofoni, indicate con:
1-18; 2-17 ; 3-16; 4-15 ...
Supponiamo, ad esempio, che il suono della sorgente colpisca la base secondo l'angolo α = 0°,
asse della base, e che i tempi d'impatto rispetto alla coppia (1-18) siano:
t(1-18) = 0 μSec
t(2-17) = 42 μSec
t(3-16) = 111 μSec
t(4-15) = 215 μSec
Dato che il massimo della curva di direttività della base si ottiene con la somma di tutte
le tensioni degli idrofoni che abbiano lo stesso tempo di percorrenza si può impostare
la seguente tabella nella quale si elencano i tempi d'impatto ed i tempi di ritardo necessari
affinché l'esigenza sia soddisfatta:
coppie
tempo d'impatto
μSec.ritardo aggiunto
μSec.somma ritardi
μSec.
(1-18)
0
t1 = 215
215
(2-17)
42
t2 = 173
215
(3-16)
111
t3 = 104
215
(4-15)
215
t4 = 0
215
Applicando i ritardi ora calcolati si ottiene una configurazione elettrica della base circolare
"compensata" (tutti i segnali ricevuti sono messi in coerenza tra loro) come mostra la figura 4:
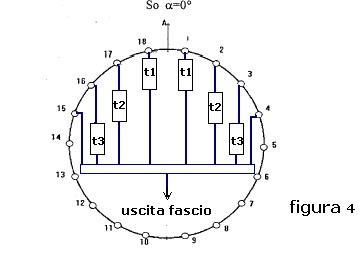
Per il fascio contiguo, formato dalle coppie 2-1; 3-18; 4-17; 5-16, la geometria è identica a
quella precedente ed i ritardi da applicare sono gli stessi; questo per tutti gli altri fasci il
cui asse passi tra due idrofoni contigui.
I tempi di ritardo necessari per la formazione dei fasci possono essere realizzati in diversi modi;
per semplici strutture sonar con catene di ritardo analogiche, per sonar a trattamento misto dei
segnali i ritardi possono essere fatti con dei registri a slittamento, per strutture complesse la
rimessa in coerenza è affidata al software di macchine superveloci.
Uno dei punti importanti che interessano il progetto dei sistemi a fasci preformati
è relativo al numero N di questi realizzabile utilizzando una
data base idrofonica; il problema è stato studiato ed illustrato in p3 relativamente ad una
base circolare,
qui ci limitiamo a riportarne gli elementi essenziali che consentono di stabilirne il numero in
base alla seguente espressione:
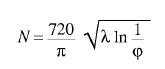
dove:
ln (per logaritmi a base e )
φ = Δβ / 4
con Δβ = massimo errore angolare accettato
λ = si ricava dall'espressione:
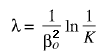
nella quale βo e K si determinano dalla curva di direttività artificiale disponibile secondo
il tracciato, ad esempio, di figura 5
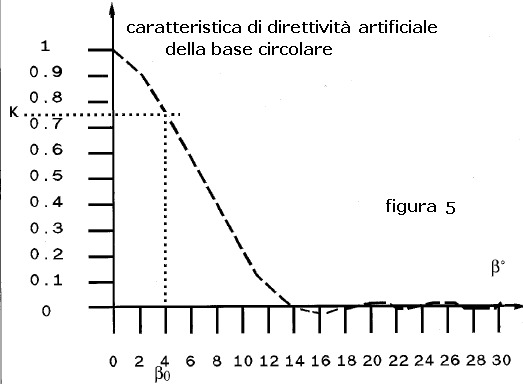
dove la coppia βo e K si sceglie nell'intorno dell'ampiezza k = 0.7 .
Il numero N dei fasci preformati è subordinato, sia dalla larghezza del lobo della caratteristica
di direttività artificiale, sia dal massimo errore di puntamento accettato.
Tanto più stretto è il lobo di direttività tanto più è elevato deve essere il numero dei fasci.
Tanto più piccolo è l'errore accettato tanto più è elevato deve essere il numero dei fasci.
Un esempio di calcolo sulla base di figura 5:
per βo = 4° si ha K = 0.74
quindi λ = (1 / 16) ln(1 / 0.74) = 0.0188
se assumiamo, ad esempio, un errore massimo Δβ = 0.04°
si ha φ = 0.01
quindi:
N = (720 / 3.14) √ [0.0188 ln (1 / 0.01)] = 67 fasci preformati
In qualsiasi modo i fasci vengano realizzati ciascuno di essi fornisce un contributo numerico
o di tensione che dipende dalla posizione della sorgente acustica rispetto ad esso.
Se la sorgente acustica è sulla stessa direzione del fascio il contributo del fascio sarà il massimo
e quindi facilmente determinabile angolarmente tra gli altri fasci.
Se la sorgente acustica è invece compresa tra le direzioni di due fasci adiacenti ciascuno di essi
darà un contributo che difficilmente potrà essere determinante per stabilire la direzione di
provenienza del suono dato che questa è disposta, non simmetricamente, tra i due fasci.
Le due condizioni menzionate sono riportate graficamente in figura 6:
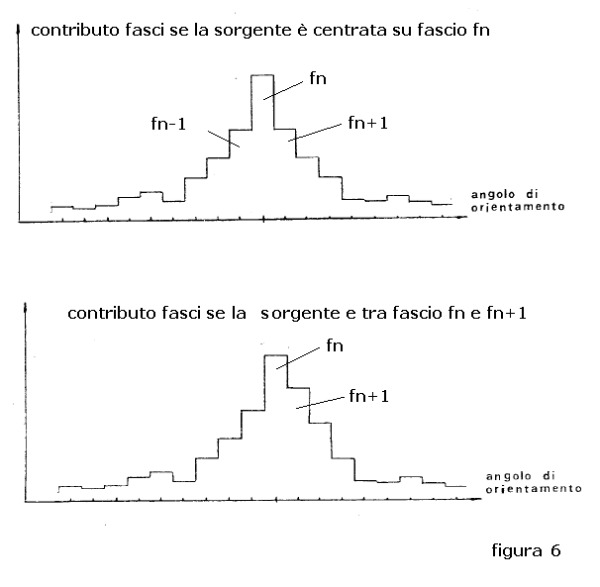
Una volta stabilito il numero N dei fasci con il criterio di par.4 la situazione emergente in
figura 6 è risolvibile con la precisione che il valore di N calcolato assicura (si vedano dettagli su p3).
Se la scansione degli N contributi dei fasci, sorta di campionamento, viene applicata ad una struttura, numerica od analogica,
in grado di esercitare un'azione passa basso il problema è risolto.
Con l'applicazione dell'algoritmo per la ricostruzione dei segnali campionati, ad esempio :
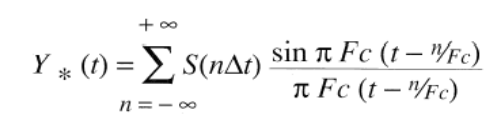
si ricostruiscono le direttività intermedie ai fasci come se quest'ultimi fossero di gran lunga
maggiori di N; in questo modo, dovunque sia collocata la sorgente acustica, la formula d'interpolazione
ne consente il corretto rilevamento (si vedano dettagli su p38).
Una visione del risultato dell'interpolazione è riportata in figura 7:
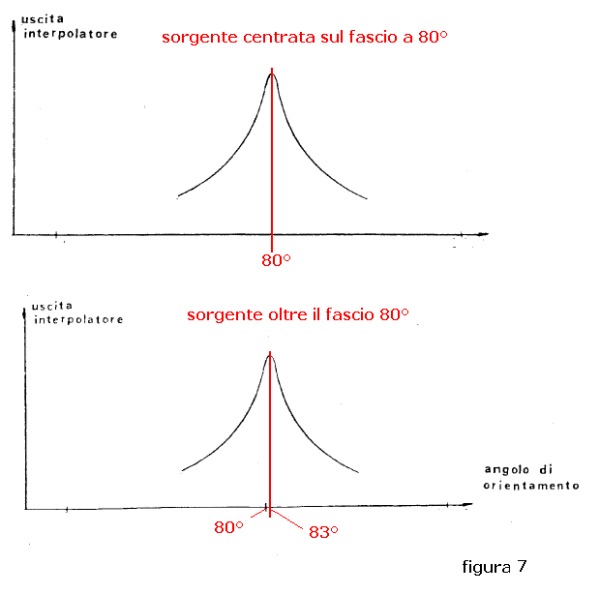
dove i contributi dei fasci si presentano, ad esempio, nel tracciato in alto, con la sorgente centrata
sul fascio a 80° , nella parte inferiore con la sorgente leggermente scostata ( + 3°) dal fascio 80° e
correttamente rilevata per 83°.
Uno schema di principio che mostra l'insieme completo di un sistema a fasci preformati con la scansione
e l'interpolatore finale è riportato in p2/cap.4/par.4.5/fig 4.19.
Alla fine della II guerra mondiale l'esplorazione dell'orizzonte subacqueo con il sonar era ancora fatta
manualmente movimentando apposito trasduttore e/o compensatore elettromeccanico.
Il processo non consentiva l'esplorazione simultanea di tutto lo spazio nemmeno impiegando
basi riceventi circolari dato che, anche se un'ipotesi di lavoro in tal senso sarà stata certamente
fatta, la tecnologia dell'elettronica non offriva i mezzi adatti alla soluzione del problema.
Soltanto dopo il 1947 con lo sviluppo dei circuiti a transistori e di seguito nel 1956 con i
circuiti integrati sono stati realizzati dispositivi per commutazione veloce in grado di esplorare,
in brevi periodi di tempo, serie numerose di contributi, analogici o numerici, generati da basi
idrofoniche opportunamente trasformate da sistemi direttivi a variazione manuale in sistemi a
direttività multiple permanenti (fasci preformati).
L'approccio ai fasci preformati ottenuti a mezzo elaborazione numerica dei contributi generati
dalle basi idrofoniche inizia lentamente nel 1971, con l'avvento dei microprocessori, e si concretizza
verso il 1990 con le macchine di calcolo superveloci.
Un sonar a fasci preformati, sviluppato con tecnologia mista, circuiti integrati per la serializzazione
dei fasci e software di scansione e presentazione simultanea di tutto l'orizzonte su P.C, è stato
realizzato e sperimentato nel periodo (2001-2002) presso l'Arsenale MMI di La Spezia ( si veda FALCON in p49 ed altri ).