SONAR-INFO-p274
Le portate del sonar passivo in funzione delle grandezze
LI, NL, RC, d, variabili indipendentemente l'una dall'altra.
1) Generalità
In modo simile agli sviluppi sui calcoli di portata passiva del sonar riportati in p272 a scopo di solo esercizio, su questa pagina mostriamo, a fini operativi sul campo, come le grandezze LI, NL, DT, RC, d, variabili indipendentemente l'una dall'altra modifichino la portata R del sonar passivo.Anche in questo contesto le operazione di calcolo sono indirizzate alla soluzione del sistema trascendente:

dipendente dalle grandezze indicate da svilupparsi con la sezione dedicata del calcolatore SONARMATH.
2)Calcolo della portata di un sonar di riferimento
Per la prosecuzione del nostro lavoro è utile il calcolo della portata di un sonar, che riterremo di riferimento, sul quale determinare le variazioni della portata R in funzione delle altre grandezze variabili indipendentemente l'una dall'altra.Per la soluzione del sistema trascendente in R si utilizza il calcolatore veloce SONARMATH ( nella sezione dedicata al calcolo della portata dei sonar passivi) inserendo, a titolo d'esempio, la sequenza delle seguenti grandezze:
f1 = 8000 Hz
f2 = 12500 Hz
SL = 123.2 dB
DI = 24 dB
NL = 48 dB (per mare forza 3)
RC = 1 Sec.
d = 2 ( per Priv = 50%; Pfa = 10% )
Il calcolo con SONARMATH, una volta digitati i dati sopra indicati, porta al risultato mostrato in figura 1 nel pannello operativo della sezione prescelta dall'operatore:
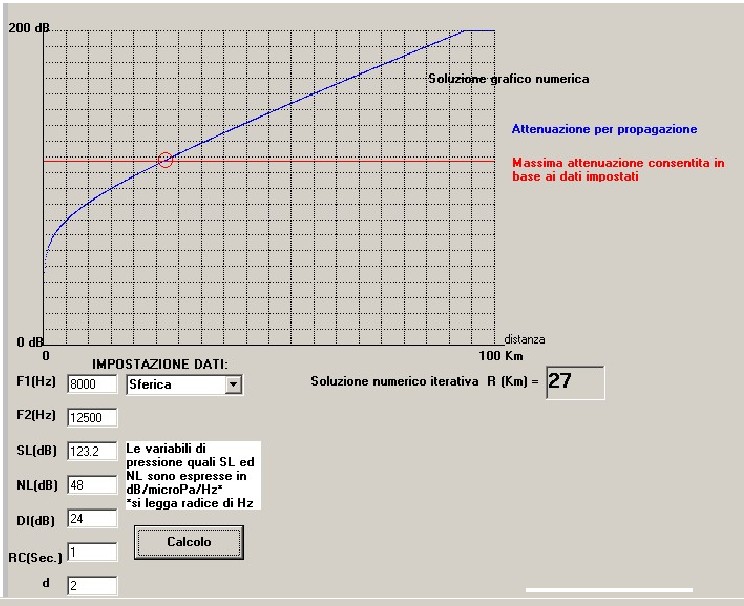 figrra 1
figrra 1Come si vede la portata di scoperta R risulta, sia nel grafico che nella casella del calcolo numerico iterativo pari a 27 Km.
Con i risultati che caratterizzano il sonar di riferimento possiamo procedere alla determinazione di una serie di valori di portata dipendenti dalle diverse grandezze rese variabili indipendentemente l'una dall'altra.
3)Analisi della variazione della portata di scoperta in funzione della velocità del bersaglio
(R = f(V))
La relazione che lega SL alla velocità del bersaglio è mostrata nei grafici di figura 2 relativi a C.T. della seconda guerra mondiale:
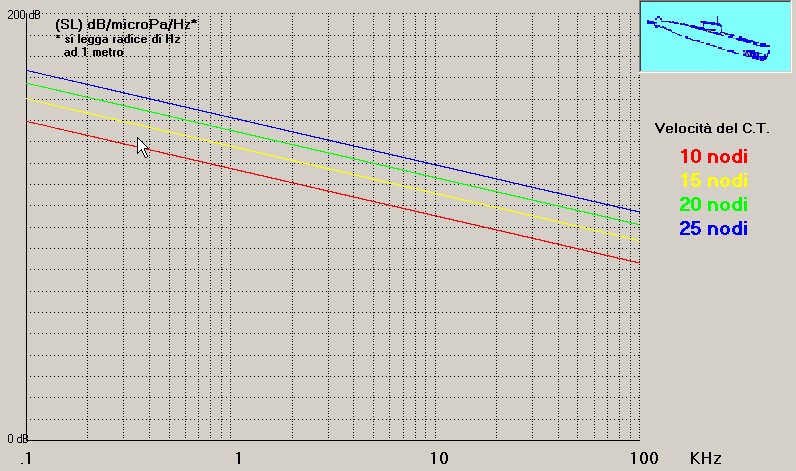 figura 2
figura 2Data la banda di ricezione del sonar di riferimento ( 8000 - 12500 ) il valore della frequenza centrale fo sarà:
fo = √ ( 8000 x 12500 ) = 10000 Hz
Con questo valore di fo dalla figura 2 si possono valutare i corrispondenti valori di SL in funzione della velocità del bersaglio ottenendo la tabella 1:
| Vel. nodi | SL (dB/Hz) |
| 5 | 95 |
| 10 | 105.3 |
| 15 | 115.8 |
| 20 | 123.2 |
| 25 | 129.2 |
| 30 | 135 |
Il contenuto della tabella 1 è riportato in grafico in figura 3:
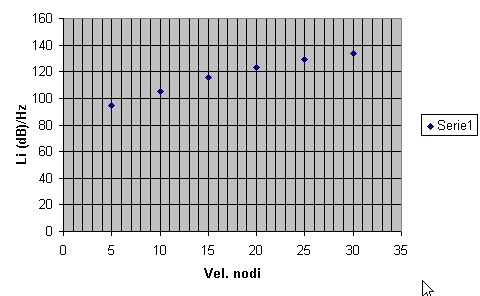 figura 3
figura 3Con la serie di dati di tabella 1 si calcolano con il SONARMATH i valori di portata del sonar di riferimento al variare di SL ferme restando tutte le altre grandezze; i valori di R = f (velocità bersaglio) calcolati sono riportati in tabella 2
| Vel. nodi | Portata R (Km) |
| 5 | 9 |
| 10 | 15 |
| 15 | 22 |
| 20 | 27 |
| 25 | 31 |
| 30 | 36 |
Il grafico di tabella 2 è riportato in figura 4:
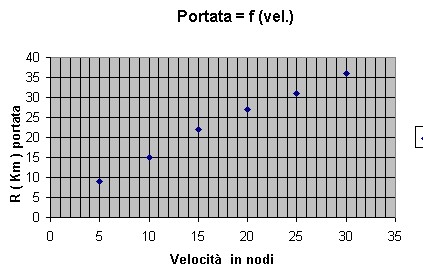 figura 4
figura 4Se nella figura 4 si traccia la linea media tra i punti si ha la figura 5 che indica la pendenza della curva come in figura 5
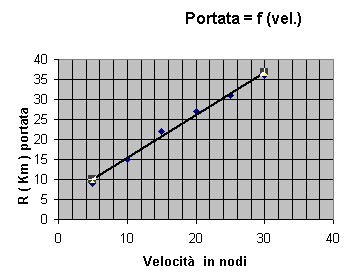 figura 5
figura 5pendenza che evidenzia un incremento di portata del sonar di 2.5 Km ad ogni incremento di velocità del bersaglio pari ad 1 nodo.
4)Analisi della variazione della portata di scoperta in funzione dello stato del mare (R = f(SS))
Nel sistema trascendente riportato nel paragrafo 1) compare la variabile NL ( rumore del mare ) che, come è noto, dipende oltre che dalla frequenza anche dallo stato del mare (SS); è quindi d'interesse determinare come varia la portata di scoperta R del bersaglio al variare dello stato del mare ferme restando tutte le altre variabili che concorrono al calcolo della portata del sonar di riferimento.La relazione che lega NL alla forza del mare è mostrata nei grafici di figura 6 secondo Knundsen:
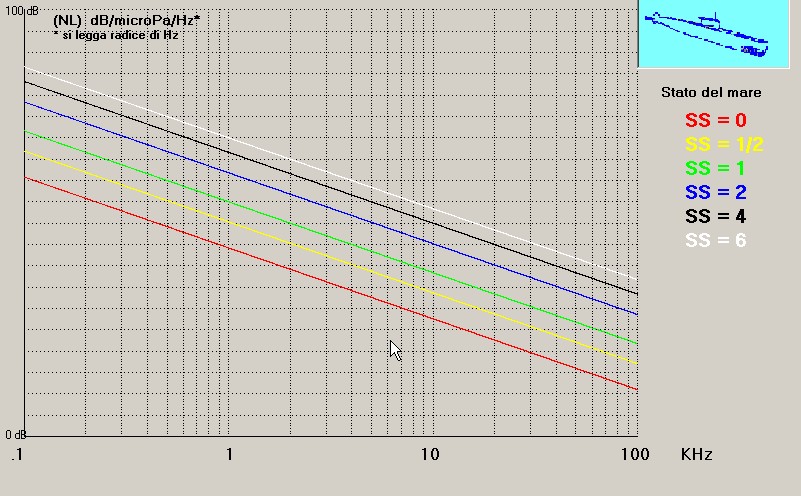 figura 6
figura 6Data la banda di ricezione del sonar di riferimento ( 8000 - 12500 ) il valore della frequenza centrale fo sarà:
fo = √ ( 8000 x 12500 ) = 10000 Hz
Con questo valore di fo dalla figura 6 si possono valutare i corrispondenti valori di NL in funzione dello stato del mare (SS) ottenendo la tabella 3:
| Stato del mare (SS) | NL (dB/Hz) |
| 0 | 27.6 |
| 0.5 | 33.7 |
| 1 | 38.4 |
| 2 | 45.2 |
| 3 | 48 |
| 4 | 50 |
| 5 | 52 |
| 6 | 53.4 |
Il contenuto della tabella 3 è riportato in grafico in figura 7:
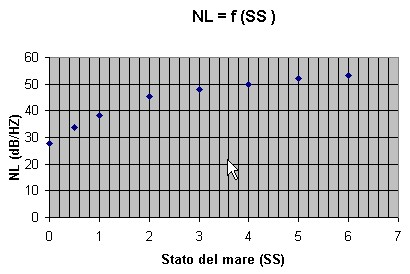 figura 7
figura 7Con la serie di dati di tabella 3 si calcolano con il SONARMATH i valori di portata del sonar di riferimento al variare di NL ferme restando tutte le altre grandezze; i valori di R = f (stato del mare) calcolati sono riportati in tabella 4
| Stato del mare (SS) | Portata R (Km) |
| 0 | 42 |
| 0.5 | 37 |
| 1 | 34 |
| 2 | 29 |
| 3 | 27 |
| 4 | 25 |
| 5 | 24 |
| 6 | 23 |
Il grafico di tabella 4 è riportato in figura 8:
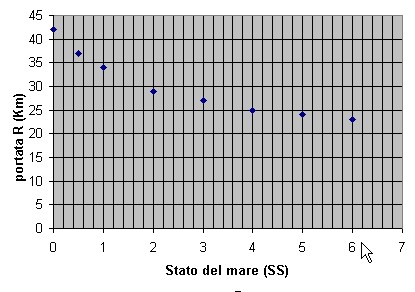 figura 8
figura 8Se nella figura 8 si raccordano i punti mediante una polinomiale si ha di fatto una funzione continua nell'intervallo di SS; da SS =0 a SS = 6 come mostra figura 9
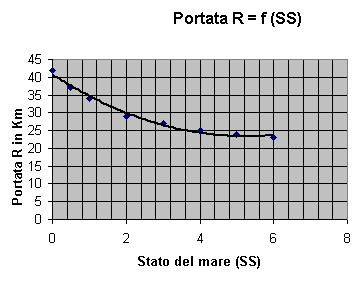 figura 9
figura 9La figura 8 mostra come il sonar di riferimento, i cui calcoli di portata sono riportati nel paragrafo 2, sia penalizzato con il crescere della forza del mare; la portata di scoperta di 27 Km, computata per riferimento con SS = 3, si riduce progressivamente a 23 Km per mare forza 6 (SS = 6).
Se invece il rumore del mare scende da forza 3 a forza 0.5 il sonar di riferimento incrementa la sua portata di scoperta da 27 Km a 37 Km.
5)Analisi della variazione della portata di scoperta in funzione della costante di tempo d'integrazione (R = f(RC))
Nel sistema trascendente riportato nel paragrafo 1) compare la variabile DT ( soglia di rivelazione ) che è funzione della costante d'integrazione RC, espressa in secondi; RC dipende dai comandi dell'operatore al sonar; è quindi d'interesse determinare come varia la portata di scoperta R del bersaglio al variare di RC restando tutte le altre variabili che concorrono al calcolo della portata del sonar di riferimento.La relazione che lega il DT alla costante di tempo RC è sotto indicata:

Il legame esistente tra RC, tramite DT, ed R è calcolabile in forma tabellare, ripetendo per un ragionevole numero di volte il calcolo di portata con il SONARMATH, registrando le coppie di ciascun processo di calcolo: RC e la portata R.
Supponiamo quindi di eseguire i calcoli di portata del sonar di riferimento per i seguenti 5 valori della costante di tempo ferme restando tutte le altre variabili:
RC: 0.5 Sec. - 1 Sec. - 5 Sec. - 25 Sec. - 125 Sec.
| Costante di tempo Sec. | Portata R (Km) |
| 0.5 | 25 |
| 1 | 27 |
| 5 | 29 |
| 25 | 32 |
| 125 | 35 |
Il contenuto della tabella 5, interpolato con una curva logaritmica, è riportato in grafico in figura 9:
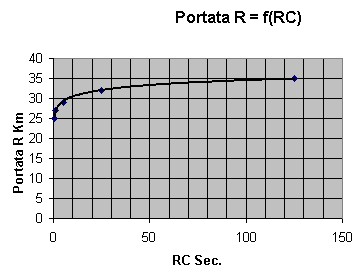 figura 9
figura 9Dalla curva si osserva che nel primo intervallo, tra RC = 0.5 Sec. e RC = 5 Sec. la portata cresce di 5 Km; per ottenere un incremento di portata dello stesso valore nel secondo intervallo la costante di tempo deve aumentare di altri 120 Sec.
Interpretando la curva sotto un aspetto operativo del sonar sul campo si comprende che con costanti di tempo superiore a 5 Sec. la risposta del sistema di rivelazione del sonar è troppo lenta e non consente, in generale, l'inseguimento dei bersagli in movimento.
E' perciò evidente che il valore di RC non può essere aumentato oltre valori tatticamente accettabili.
6)Analisi della variazione della portata di scoperta in funzione del parametro probabilistico "d" (R = f(d))
Nel sistema trascendente riportato nel paragrafo 1) compare la variabile DT ( soglia di rivelazione ) che è funzione del parametro probabilistico "d", dipendente del valore di soglia impostato dall'operatore al sonar; è quindi d'interesse determinare come varia la portata di scoperta R del bersaglio al variare di "d" restando tutte le altre variabili che concorrono al calcolo della portata del sonar di riferimento.La relazione che lega il DT al parametro "d" è sotto indicata:
Il legame esistente tra "d", tramite DT, ed R è calcolabile in forma tabellare, ripetendo per un ragionevole numero di volte il calcolo di portata con il SONARMATH, registrando le coppie di ciascun processo di calcolo: "d" e la portata R.
Supponiamo quindi di eseguire i calcoli di portata del sonar di riferimento per i seguenti 7 valori del parametro "d" ferme restando le altre variabili:
| Parametro "d" | Portata R (Km) |
| 1.4 | 28 |
| 2 | 27 |
| 4 | 26 |
| 8 | 25 |
| 16 | 23 |
| 32 | 22 |
| 64 | 21 |
Il contenuto della tabella 6, interpolato con una curva logaritmica, è riportato in grafico in figura 10:
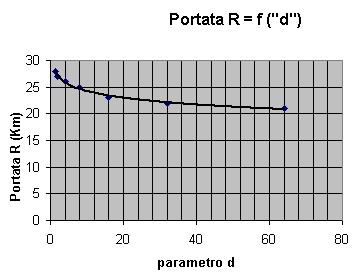 figura 10
figura 10Per "d" = 1.4 si ha la portata più alta ( R = 28 Km ) in condizioni medie di probabilità di scoperta e falso allarme, rispettivamente, ad esempio, la coppia Priv = 50 %; Pfa = 10 %
A mano a mano che il valore del "d" cresce si riduce la portata R con conseguenti incrementi di Priv ed decrementi di Pfa; fino al valore più elevato di "d = 64" per il quale si ha: R = 21 Km, Priv = 99.99 % e Pfa = 0.01 %
I valori di Priv. e Pfa. in funzione di "d" sono determinati con il calcolatore delle curve ROC disponibile a pagina p80.