SONAR-INFO-p218
Sonar Tracking
La funzione d'inseguimento automatico dei bersagli
1) Generalità 2) L'algoritmo di correlazione per il circuito RLI 3)Il processo di decisione per l'inseguimento automatico 4)Sul rumore nell'anello di figura 3 5)Un sistema di puntamento storico
La funzione d'inseguimento dei bersagli consente di conoscere, istante dopo istante ed in modo
automatico, la posizione angolare degli stessi rispetto all'asse del sommergibile, ciò durante
le evoluzioni sia dei bersagli che di quest'ultimo.
Detta funzione si realizza tramite circuiti del tipo RLI (Right Left
Indicator) già illustrati nella pagina p140 in hardware e in particolari routine di calcolo
nelle soluzioni software.
In questa pagina tratteremo sistemi hardware che più si prestano ad essere
illustrati in modo chiaro, una delle soluzioni software, studiata per il sonar FALCON sarà
oggetto di una pagina a venire.
Vediamo ora come sono, di massima, organizzate le funzioni operative per l'inseguimento automatico
dei semoventi navali impostate su strutture caratteristiche definite dal termine
" Sistemi di puntamento" quale ad esempio quelli illustrati nella pagina p39.
L'algoritmo di correlazione di cui al titolo risponde alla seguente espressione:
 1)
1)
dove:
Fo = ( F1 + F2 ) / 2
DF = (F2 - F1 ) / 2
F1 = frequenza inferiore della banda di ricezione; in Hz
F2 = frequenza superiore della banda di ricezione; in Hz
r = variabile indipendente; in Sec.
ra = d Sen( a° ) / 1530 ; ritardo dell'onda dovuto alla posizione angolare del bersaglio.
a° = angolo di puntamento del bersaglio; in gradi
d = lunghezza della base; in m.
L'algoritmo HC(r) è sviluppato tramite apposito circuito di correlazione dotato di sfasatori a 90°
secondo lo schema sotto riportato:
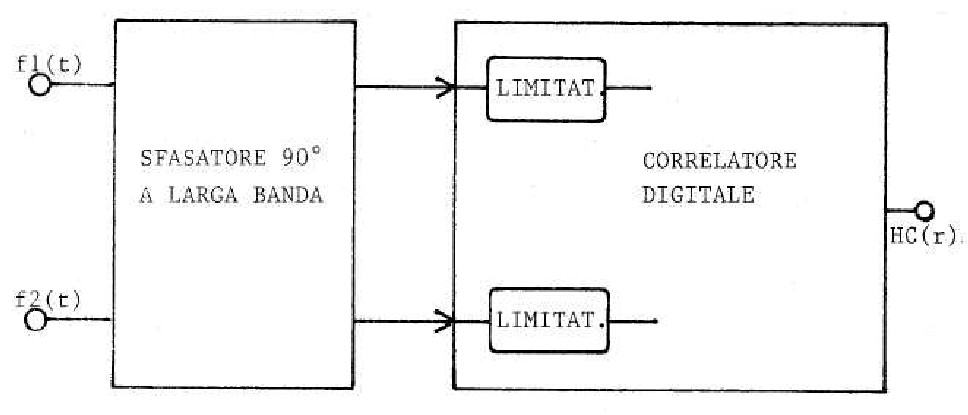 Figura 1
Figura 1
L'andamento di HC(r), per F1 = 2000 Hz e F2 = 10000 Hz, ed a = 27°, è riportato
in figura 2 per r variabile da 0 a 1000 μ Sec.
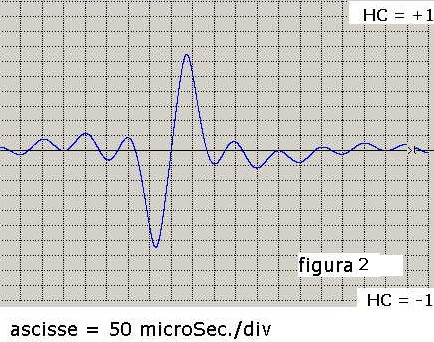
La curva mostra come al posto del massimo di C(r), per r = 400 μSec. la HC(r) ha uno zero
oltre il quale è positiva o negativa in base alle variazioni di ra.
Naturalmente l'andamento di figura 2 è valido anche per le funzioni CH(r) sviluppate in software.
Il processo di decisione, affidato ad una struttura hardware o software deve seguire il
seguente percorso logico:
1) Se la CH(r) = 0 il bersaglio è collimato con un "sistema di puntamento" e nessuna azione deve essere sviluppata.
2) Se la CH(r) > 0 significa che il bersaglio si è spostato angolarmente a destra e pertanto
il sistema d'inseguimento deve ruotare a destra il "sistema di puntamento" in modo da riportare la CH(r) a livello zero.
3) Se la CH(r) < 0 significa che il bersaglio si è spostato angolarmente a sinistra e pertanto
il sistema d'inseguimento deve ruotare il "sistema di puntamento" in tal senso in modo da riportare la CH(r) a livello zero.
Il processo si ripete in continuità, passo dopo passo, in funzione dell'evoluzioni
del bersaglio lungo l'arco dell'orizzonte.
Dato che la CH(r) è ottenuta tramite un algoritmo di correlazione la sua velocità di assestamento
sugli zeri sarà subordinata alla costante di tempo del correlatore; per costanti di
tempo piccole il sistema d'inseguimento sarà veloce, quindi adatto a bersagli ad elevata dinamica
di spostamento pagando il prezzo di un modesto guadagno sul rapporto segnale/disturbo.
Per costanti di tempo elevate, tali da ottimizzare il rapporto segnale/disturbo la velocità
di assestamento della CH(r) sullo zero sarà bassa e di conseguenza adatta soltanto per
bersagli in lento movimento.
Il processo ora descritto è schematizzato in figura 3, per soluzione hardware, secondo la sequenza d'eventi sotto riportata:
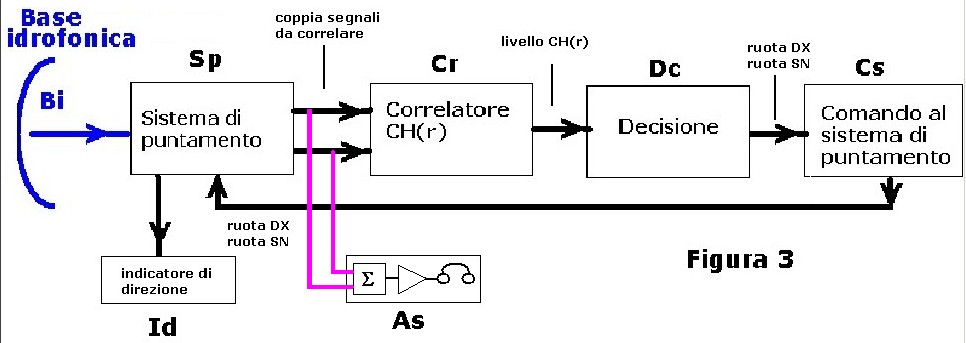
A) Supponiamo che la base idrofonica Bi sia colpita dal rumore di un bersaglio collocato angolarmente
sull'asse della base stessa, supponiamo altresì che il "sistema di puntamento" Sp sia collimato
perfettamente sul bersaglio.
In tali condizioni il correlatore Cr, avendo segnali coerenti d'ingresso, avrà un livello d'uscita: CH(r) = 0 ed il blocco di decisione
Dc non trasferirà nessuna informazione al modulo Cs che deve agire sul "sistema di puntamento", ne
consegue che Sp resterà immobile sulla direzione del bersaglio.
B) Se il bersaglio si sposta a destra rispetto all'asse di Bi il "sistema di puntamento" Sp invia
al correlatore Cr segnali non più coerenti tra loro e tali che il livello di CH(r) risulta maggiore
di zero.
L'informazione di CH(r) > 0 viene acquisita da Dc che tramite Cs fà ruotare il
"sistema di puntamento" per riportarlo in condizioni di puntamento della nuova direzione
fino a che nuovamente CH(r) sia uguale a zero.
C) Se il bersaglio si sposta a sinistra rispetto all'asse di Bi il "sistema di puntamento" Sp invia
al correlatore Cr segnali non più coerenti tra loro e tali che il livello di CH(r) risulta inferiore
a zero.
L'informazione di CH(r) < 0 viene acquisita da Dc che tramite Cs fà ruotare il
"sistema di puntamento" per riportarlo in condizioni di puntamento fino a che nuovamente
CH(r) sia uguale a zero.
Le sequenze d'intervento del sistema portano la posizione angolare di Sp sempre sulla posizione
angolare assunta dal bersaglio rendendo tale informazione all'operatore al sonar tramite l'indicatore
Id; contemporaneamente l'operatore può ascoltare il rumore del bersaglio inseguito tramite
il circuito d'ascolto As.
L'anello di figura 3, dipendendo da un processo di correlazione, è affetto da rumore - la varianza
di CH(r) -; questo rumore porta il livello di HC(r) ad ondulare attorno al valore normale producendo
una serie di comandi spuri al blocco Dc che, tramite Cs, porta ad instabilità il valore di
collimazione del sistema di puntamento Sp.
Questo problema è tanto più evidente quanto la costante di tempo del correlatore è piccola al fine
di rendere l'inseguimento automatico più veloce.
Per minimizzare l'azione del rumore nell'anello il blocco di decisione Dc è dipendente da un
particolare ciclo d'isteresi che limita la risposta dell'anello entro frazioni di grado.
L'isteresi porta ad un'inevitabile errore di puntamento ma rende stabile il sistema tutto.
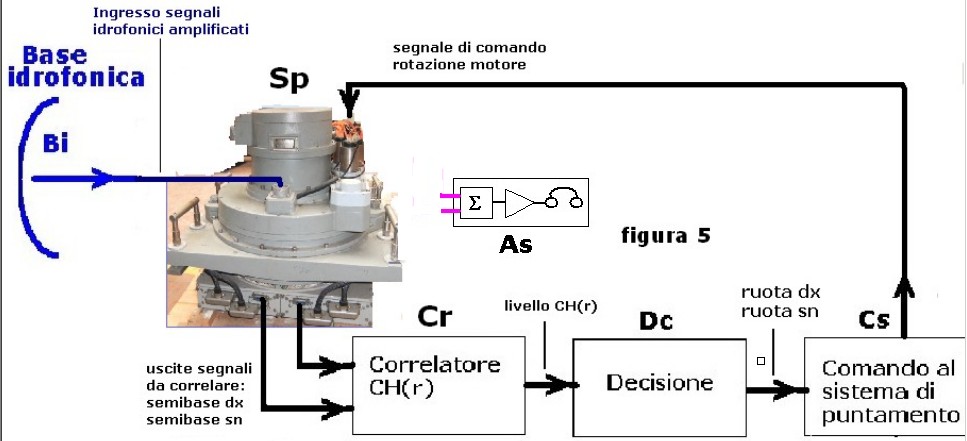
E' interessante esaminare un "sistema di puntamento" in correlazione che nel 1970, primo in Europa,
ha consentito la scoperta e l'inseguimento automatico dei bersagli nei sonar IP70 USEA installati sui
sommergibili della classe Sauro.
Il manufatto in oggetto è riportato in figura 4
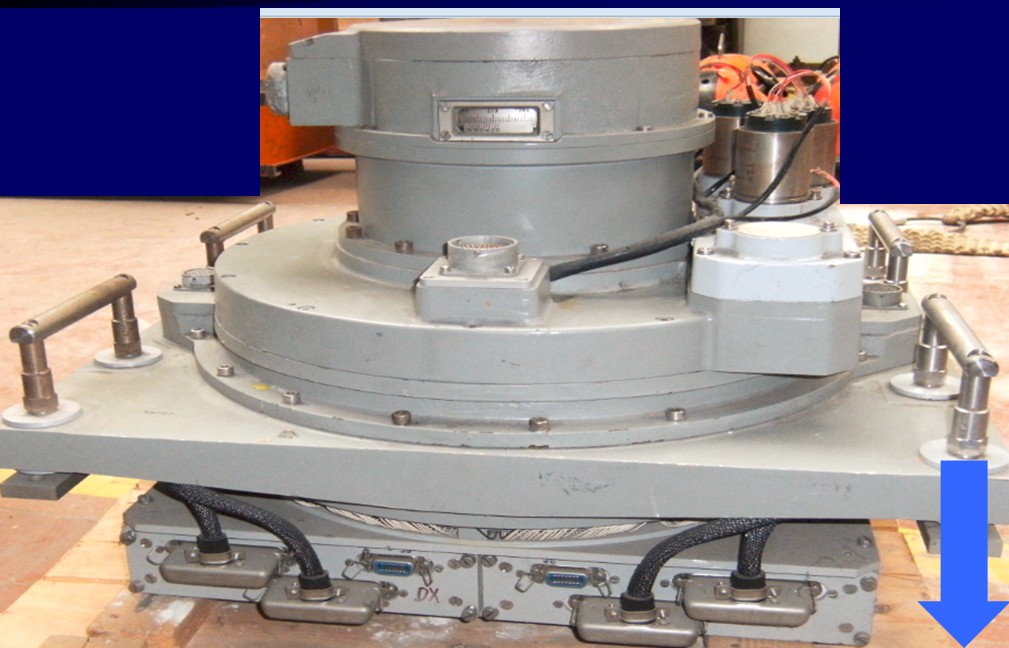 Figura 4
Figura 4
L'inserimento del "sistema di puntamento" nell'ambito dell'anello di figura 3 è riportato
in figura 5: