SONAR-INFO-p202
'''Tutti i contenuti di questa pagina sono distribuiti con licenza licenza Creative Commons Attribuzione - Condividi allo stesso modo 3.0 Unported.'''
Il sonar a profondità variabile delle navi di superficie 1) Generalità 2)Caratteristiche del modello preso ad esempio 3) Calcolo delle traiettorie dei raggi acustici 4) La scoperta del bersaglio con il sonar VDS 5) Breve cenno sulla struttura del VDS
(VDS: Variable Depth Sonar)
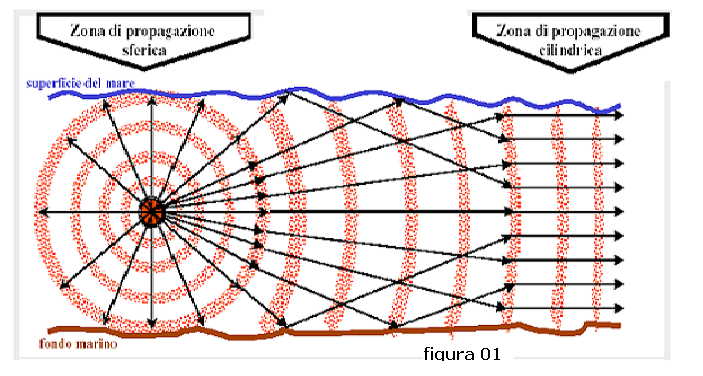
E' noto che se l'acqua del mare, in zone non molto profonde, fosse perfettamente omogenea
e alla stessa temperatura a tutte le quote, i raggi acustici si propagherebbero per successive onde
sferiche nei primi 1000 metri di distanza dal generatore dopo di che, a seguito riflessioni dal fondo
e dalla superficie, si trasformerebbero in onde cilindriche come mostra la figura 01:
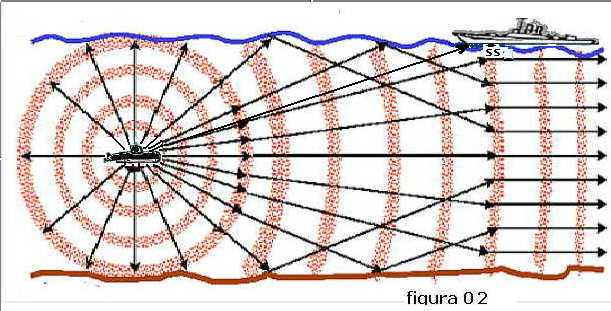
In queste condizioni ideali una nave di superficie che cercasse un bersaglio sommerso, quale un
sommergibile navigante in quota medio profonda, avrebbe gioco facile così come mostra la figura
02 nella quale si vedono i raggi acustici emessi dal bersaglio colpire la nave :
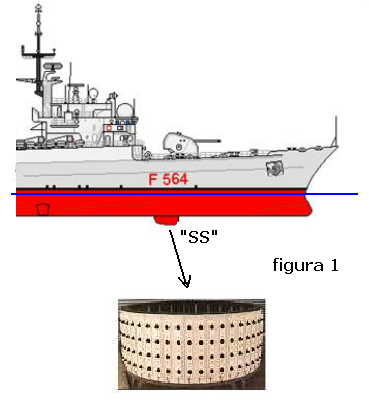
La nave ha un sonar con base acustica "SS" disposta a scafo così come mostra la figura 1:
La realtà fisica del mezzo è diversa e, come illustrato in p24-p26-p28-p30, la propagazione del suono
non segue le leggi sopra descritte ma assume le più disparate geometrie a causa della differenza
di temperatura dell'acqua alle diverse quote ( propagazione anomala ).
Nel caso che la propagazione del suono sia anomala l'impiego della base "SS" non è
sempre utile alla scoperta dei bersagli; in questi casi la nave si deve avvalere di un
sonar di tipo diverso con il quale intercettare i segnali acustici del bersaglio;
un esempio significativo di condizioni sfavorevoli alla ricerca delle sorgenti acustiche
è riportato nel paragrafo seguente.
1- Bativelocigramma di figura 2:
2- Profondità del sommergibile q = 125 m
3- Profondità messa a calcolo: da q = 0 a q = 200 m
4- Ampiezza dell'angolo verticale di calcolo = da + 40° a -40°
5- Numero delle tracce calcolate = 9
6- Intervallo angolare di calcolo tra le tracce = 10°
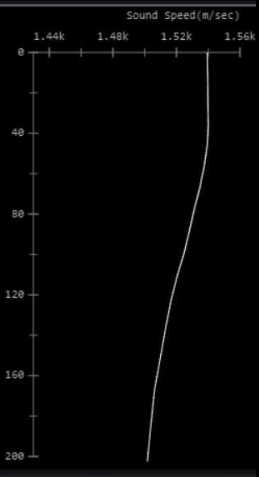 figura 2
figura 2
dalla figura 2 deduciamo:
-il rilievo è esteso da quota 0 a -200 m
-la velocità del suono è pressoché costante a 1530 m/Sec. da quota 0 m a -45 m.
-da -45 metri a -200 m la velocità del suono decresce da 1530 m/Sec. a 1500 m/Sec.
Se ipotizziamo la sorgente acustica disposta a quota -125 m e sulla base dell'andamento
del bativelocigramma calcoliamo l'andamento dei raggi acustici che ne sono conseguenza otteniamo
quanto mostrato nel paragrafo seguente.
Mettendo a calcolo i valori espressi dalla curva di figura 2 si ottiene il diagramma di figura 3
che andiamo a commentare:
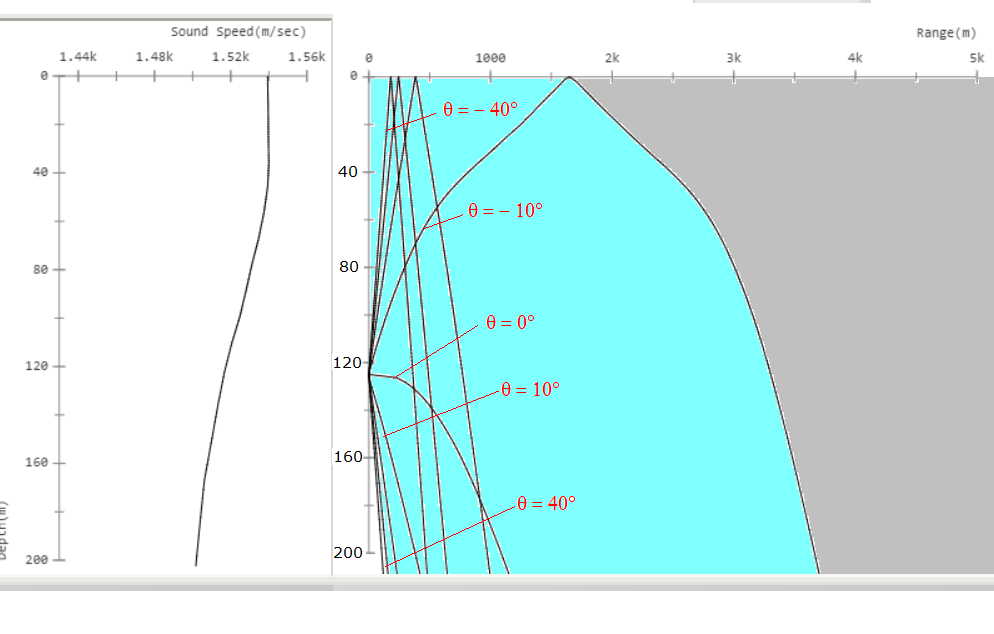 figura 3
figura 3
Dall'esame di figura 3 si evince:
1) da quota -125 m sono tracciati 9 raggi acustici per gli angoli:
-40°; -30°; -20°; -10°; 0°; +10°; +20°; +30°; +40°
2) I nove raggi in oggetto e gli innumerevoli compresi tra due successivi illuminano
una zona di mare limitata sul lato destro dal raggio a -10° curvato e riflesso dalla
superficie; questa zona è messa in evidenza dalla colorazione celeste.
3) La zona di mare che si estende a destra del raggio a -10° non è illuminata
dal suono emesso dalla sorgente, questa è una zona d'ombra messa in evidenza
dalla colorazione grigia.
Una nave che navigasse nelle condizioni di propagazione di figura 3 disponendo di sonar e base
a scafo "SS" e si trovasse nelle condizioni riportate in figura 4, a circa 4 Km dal bersaglio, non
ne scoprirebbe la presenza:
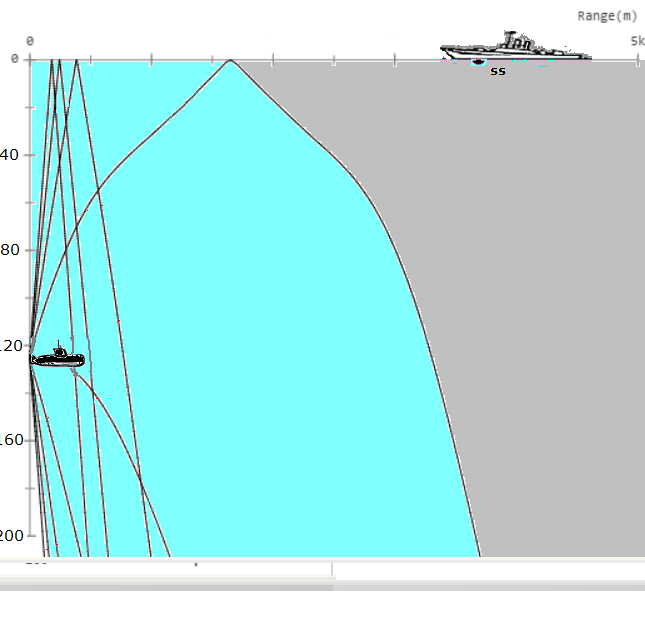 figura 4
figura 4
soltanto procedendo verso la perpendicolare al bersaglio potrebbe scoprirlo, ad una distanza di
circa 1.6 Km, una volta entrata nella zona celeste così come mostra la figura 5:
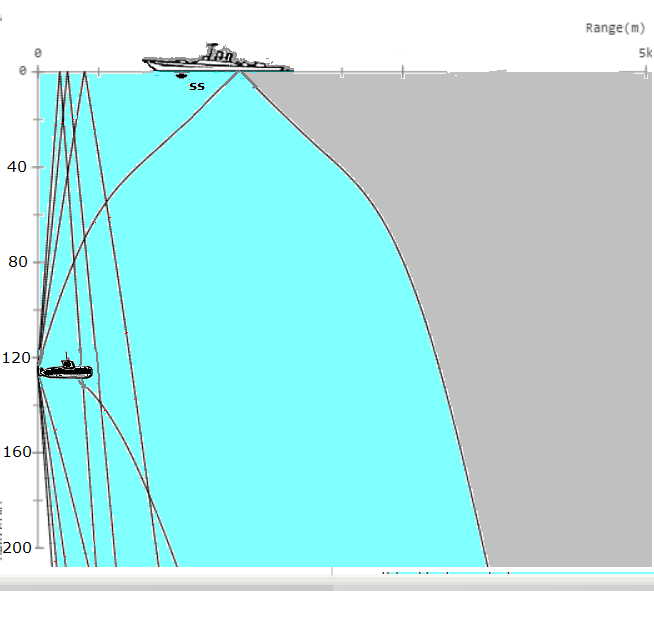 figura 5
figura 5
Se il bersaglio non è rilevabile con "SS" la nave si deve avvalere di un
sonar a profondità variabile (VDS) con il quale intercettare i segnali acustici al
di fuori delle zone d'ombra .
Il sonar in oggetto è detto a profondità variabile in quanto una speciale base
acustica , contenuta in un corpo avviato (VDS) , viene filata in mare con apposito
cavo di comandi e collegamenti tramite attrezzatura a verricello disposta a proravia
della nave, vedi figura 6:
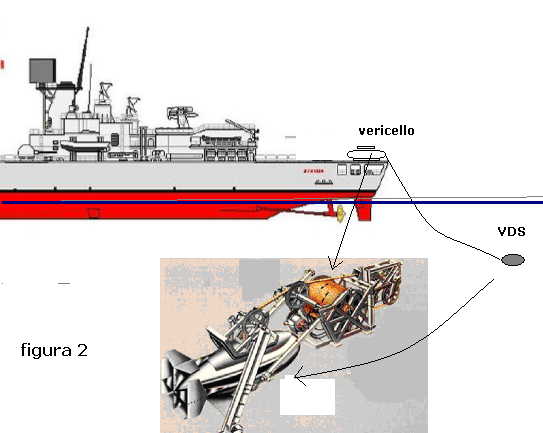 figura 6
figura 6
Il VDS viene comandato alla quota stabilita per raggiungere la profondità richiesta
per la scoperta del bersaglio.
Con l'impiego abbinato del sonar con base a scafo e il VDS la scoperta del bersaglio
è possibile in quasi tutte le condizioni di propagazione anomala dopo, naturalmente,
che si sia rilevato rispondente bativelocigramma e di seguito calcolato il percorso dei raggi
acustici dal quale stabilire la quota di navigazione più adatta per il vds; ciò è
indicativamente illustrato in figura 7:
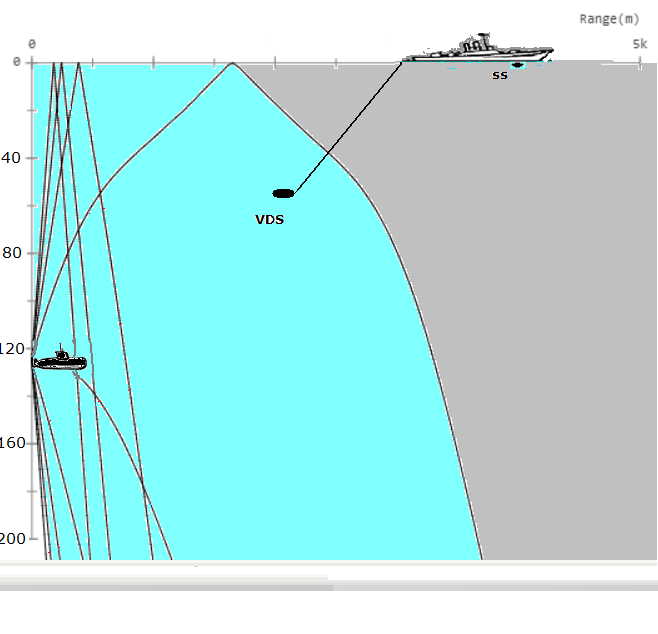 figura 7
figura 7
Con estrema sintesi si accenna alla struttura generale del sonar a profondità variabile (VDS)
per dare un'idea della complessità del sistema; non si menziona il dispositivo di governo
e di movimentazione che si intravede in figura 2.
La figura 8 mostra una sezione schematizzata di questo particolare sonar:
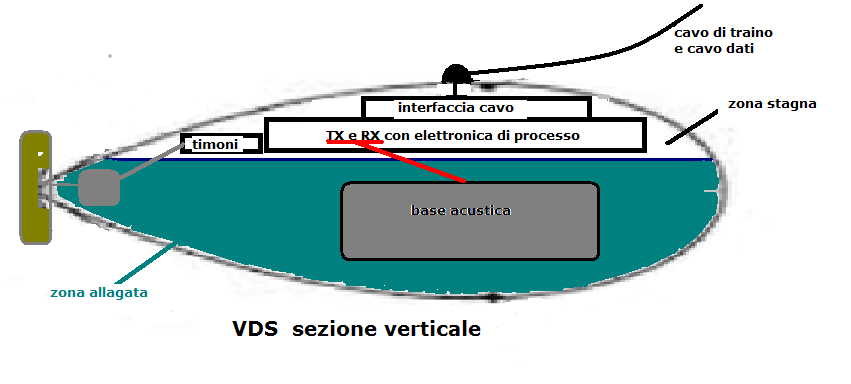 figura 8
figura 8
Il VDS può essere diviso idealmente in due sezioni:
-sezione della base acustica, completamente allagata in operazione (zona di colore celeste)
-sezione elettronica e comandi in sezione stagna (zona bianca)
A differenza di un sonar tradizionale questo apparato viene controllato e utilizzato tramite
consolle remota sulla nave trainante che può essere specifica per il VDS o di tipo standard.
La base acustica è dimensionata per le frequenze di lavoro, viene utilizzata sia per l'emissione
d'impulsi che per la ricezione degli echi conseguenti.
La base è utilizzata anche per la scoperta delle sorgenti acustiche quando i VDS è disposto
in passivo, (questo è il caso preso in esame in questa pagina).
La sezione elettronica ospita:
-interfaccia di comunicazioni bidirezionali tramite cavo dati
-preamplificatori idrofonici
-circuiti di potenza per la trasmissione degli impulsi sia in modo direttivo che panoramico
-sistema ricevente a fasci preformati per la ricezione degli echi
-sistema ricevente a fasci preformati per la ricezione dei segnali idrofonici
-circuiti e dispositivi di governo timoni
Alcuni dati d'esempio relativi alle prestazioni del VDS:
-Frequenze di lavoro stabilite dalle case costruttrici: da 1000 a 12000 Hz
-Livello indice in trasmissione omnidirezionale: dell'ordine di 220 dB/ μPa
-Trasmissione: ominidirezionale o direttiva
-Algoritmi speciali per l'ottimizzazione della scoperta
-Scoperta bersagli : oltre 30 miles
-Possibilità di operazioni in bistatico con elicottero di supporto e sonoboa
-Peso del veicolo: 930 Kg
-Velocità massima di traino: 30 Kts
-Profondità operativa: da 15 a 300 m
Una bella e significativa immagine di un VDS, in fase di rilascio prima dell'impiego
in mare, è mostrata in figura 9.
 figura 9
figura 9