SONAR-INFO-p166
Fasci preformati in correlazione 1)Generalità 2)Sul processo di correlazione 3)La geometria di alcune basi idrofoniche 4)I fasci preformati in correlazione sulle basi circolari 5)I fasci preformati in correlazione delle basi conformi 6)Le differenze tra fasci preformati comuni ed in correlazione
Composizione delle caratteristiche di direttività
Una delle funzioni fondamentali del sonar si concretizza nel sistema dei "fasci preformati".
Il sistema consente la visione simultanea di tutti i bersagli presenti sui 360° dell'orizzonte
compatibilmente con le condizioni minime valide per la scoperta dei rumori o degli echi dei
semoventi e con la forma e la collocazione della base.
In questa pagina mostreremo come comporre un insieme di fasci preformati in correlazione secondo
le procedure convenzionali; senza impiegare quindi il processo FALCON già trattato in p4.
Le procedure convenzionali consentono, con notevoli impegni di materiali e/o di
software, la realizzazione di fasci preformati in correlazione per qualsiasi profilo di base
acustica.
E' noto che il processo di correlazione, sia di tipo analogico, sia di tipo digitale, preveda
che il dispositivo delegato a tale funzione debba ricevere "due" informazioni del tipo f1(t); f2(t)
ciascuna contenente, rispettivamente, sia il segnale s1(t); s1(t + r) che i disturbi n1(t); n2(t) così
come ampiamente dimostrato nel testo riportato in p5.
L'esigenza di elaborare soltanto "due" informazioni per fascio deve conciliarsi con l'insieme
degli "n" sensori idrofonici che formano la base ricevente per la quale devono essere realizzati
i fasci preformati.
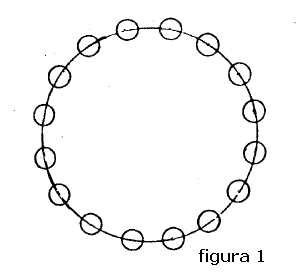
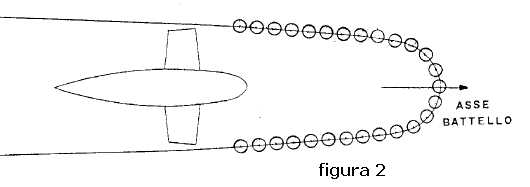
Generalmente il profilo delle basi idrofoniche montate su sommergibili è:
o di tipo circolare
o di tipo conforme alla prua del battello
così come mostrano rispettivamente le figure 1 e 2.
Come introduzione alla problematica relativa alla formazione deo fasci preformati in correlazione
riportiamo quanto esposto su p94 in merito ai fasci preformati comuni esaminando la geometria
circolare di figura 3
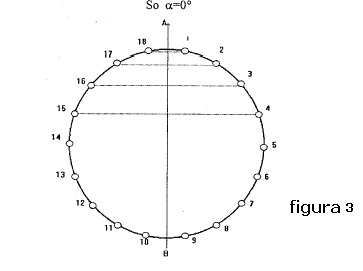
in essa osserviamo la posizione delle singole coppie d'idrofoni, indicate con:
1-18; 2-17 ; 3-16; 4-15 ...
Supponiamo, ad esempio, che il suono della sorgente colpisca la base secondo l'angolo α = 0°,
asse della base, e che i tempi d'impatto rispetto alla coppia (1-18) siano:
t(1-18) = 0 μSec
t(2-17) = 42 μSec
t(3-16) = 111 μSec
t(4-15) = 215 μSec
Dato che il massimo della curva di direttività della base si ottiene con la somma di tutte
le tensioni degli idrofoni che abbiano lo stesso tempo di percorrenza si può impostare
la seguente tabella nella quale si elencano i tempi d'impatto ed i tempi di ritardo necessari
affinché l'esigenza sia soddisfatta:
coppie
tempo d'impatto
μSec.ritardo aggiunto
μSec.somma ritardi
μSec.
(1-18)
0
t1 = 215
215
(2-17)
42
t2 = 173
215
(3-16)
111
t3 = 104
215
(4-15)
215
t4 = 0
215
Applicando i ritardi ora calcolati si ottiene una configurazione elettrica della base circolare
"compensata" (tutti i segnali ricevuti sono messi in coerenza tra loro) come mostra la figura 4:
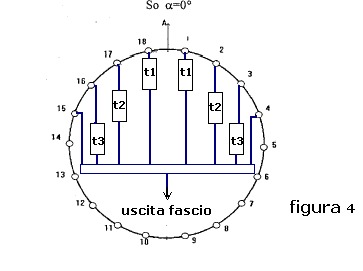
Per il fascio contiguo, formato dalle coppie 2-1; 3-18; 4-17; 5-16, la geometria è identica a
quella precedente ed i ritardi da applicare sono gli stessi; questo per tutti gli altri fasci il
cui asse passi tra due idrofoni contigui.
I tempi di ritardo necessari per la formazione dei fasci possono essere realizzati in diversi modi;
per semplici strutture sonar con catene di ritardo analogiche, per sonar a trattamento misto dei
segnali i ritardi possono essere fatti con dei registri a slittamento, per strutture complesse la
rimessa in coerenza è affidata al software di macchine superveloci.
La geometria ora studiata si presta con facilità all'estensione per la composizione dei fasci
preformati in correlazione; basterà infatti modificare la sommatoria globale di figura 4 in due
sommatorie parziali:
-il gruppo d'idrofoni 1; 2; 3; 4 per la parte sinistra dello schieramento
-il gruppo d'idrofoni 18; 17; 16; 15 per la parte destra dello schieramento
così come mostra la figura 5:
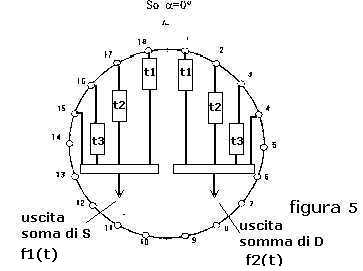
In questo modo abbiamo realizzato la coppia f1(t); f2(t) di segnali da applicare al correlatore per la
realizzazione del fascio voluto così come mostra figura 6:
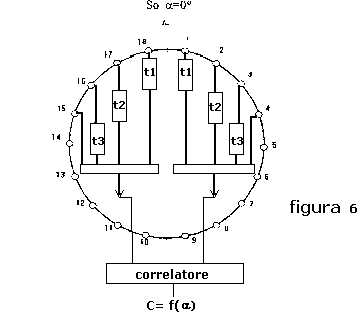
dove C= f(α) , funzione di correlazione, indica l'uscita del fascio.
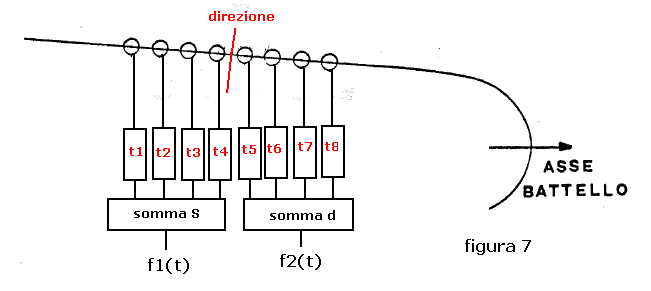
Il processo di costruzione dei fasci preformati in correlazione su basi conformi è simile
a quello relativo alle basi circolari; una volta selezionata la direzione del fascio da comporre
s'identifica lo schieramento degli idrofoni interessati e lo si divide idealmente in due parti,
ciascuna parte da rimettere in coerenza con opportuni ritardi: t1;t2;t3;t4 per la parte sinistra,
t5;t6;t7;t8 per la parte destra, in funzione della curvatura della
base che, naturalmente, salvo per la direzione centrata sull'asse del battello, è diversa dalle
due parti.
Dopo le somme parziali delle tensioni idrofoniche, opportunamente ritardate,
si ottengono le due informazioni f1(t); f2(t) da inviare al correlatore per la composizione
del fascio così come riportato in
figura 7.
Le differenze fondamentali tra i due tipi di fasci riguardano:
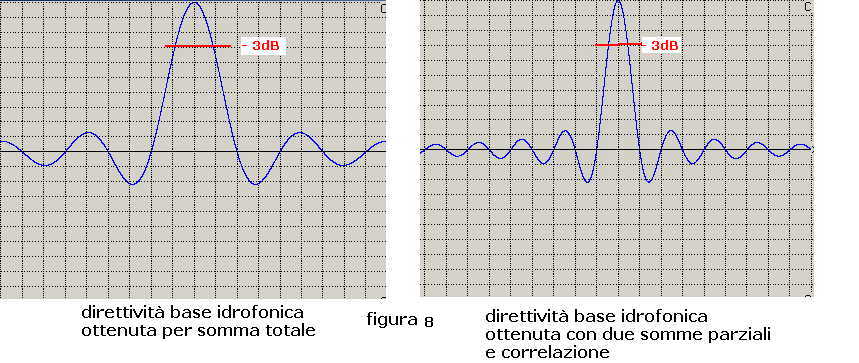
A-Larghezza del lobo di direttività misurata a -3 dB rispetto al massimo.
B-Guadagno della base.
Per la differenza relative al punto A) si deve osservare come il processo di correlazione
restringa il lobo di direttività della base nel rapporto 1 a 0.5 così come mostra la figura
8 nella quale, a sinistra è tracciata la curva di direttività di una base acustica con
fascio costruito in modo comune, a destra la curva di direttività della stessa base con
fascio costruito in correlazione:
Questa particolarità da un lato è a favore del sistema di discriminazione del sonar in quanto
consente un più accurato puntamento dei bersagli, dall'altro impegna un numero doppio di fasci
preformati rispetto al fascio comune se non si vuole che tra un fascio e il successivo la copertura
non sia adeguata alla scoperta dei bersagli.
Per la differenza relativa al punto B) si deve osservare come il guadagno di direttività della
base, supponiamo G = 24 dB nella composizione del fascio comune, si riduca di 3 dB nel caso d
composizione in correlazione, passando da G = 24 dB in un caso a G = 21 dB nell'altro.
Di questa importante differenza si deve tenere conto nella fase di progettazione del sonar, sia
per quanta riguarda il calcolo delle previsioni di portata, sia nlla stesura del diagramma dei
livelli e dei rapporti S/N.