SONAR-INFO-p161
Risponditore per sommergibili sinistrati 1) Generalità 2) La configurazione del risponditore 3)Lo schema a blocchi del risponditore 4)Caratteristiche dei traduttori 5) Sulle equazioni e le variabili per il calcolo della portata del risponditore 6) Il calcolo della portata del risponditore
Dal punto d'intersezione tra le due curve si ricava il valore R = 38 Km relativo alla portata
di scoperta degli impulsi emessi dal risponditore alla frequenza di 8200 Hz.
Per la sicurezza dei sommergibili è necessario che questi siano dotati di uno o più risponditori
acustici in grado di emettere impulsi sonori se opportunamente interrogati con segnali
a diverse frequenze generati dai sonar dei mezzi di soccorso.
In questa pagina illustreremo brevemente la struttura del risponditore USEA, tipo RS100, progettato
e costruito per i sommergibili delle classi Toti e Sauro.
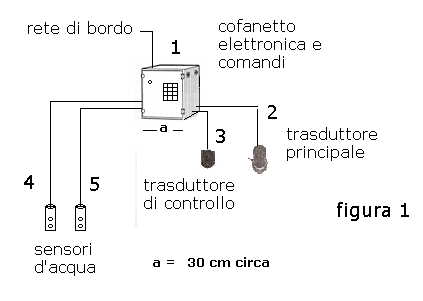
L'insieme del risponditore, illustrato in figura 1 con i componenti in scala prossima al reale
tra loro, è composto da 5 parti:
 " RS100-USEA "
" RS100-USEA "
1) Il cofanetto contenente l'elettronica, le batterie di alimentazione e il pannellino comandi
è collocato in locale protetto.
L'elettronica del risponditore è stata progettata per la ricezione e la trasmissione di impulsi
acustici a 3 diverse frequenze:
f1 = 6150 Hz
f2 = 8200 Hz
f3 = 10000 Hz
Questi valori di frequenze sono caratteristici per 3 diverse tipologie di sonar installati
su alcune navi che possono prestare soccorso.
2) Il trasduttore principale fissato all'esterno del sommergibile in zona aperta
3) Il trasduttore di controllo fissato all'esterno del sommergibile in prossimità del trasduttore principale
4-5) I sensori d'acqua collocati sul pavimento dei locali delle parti basse del battello.
Le dimensioni del cofanetto, che subordinano la capacità delle batterie d'alimentazione
e quindi dell'autonomia del risponditore, sono le massime possibili in base agli spazi
disponibili sui battelli.
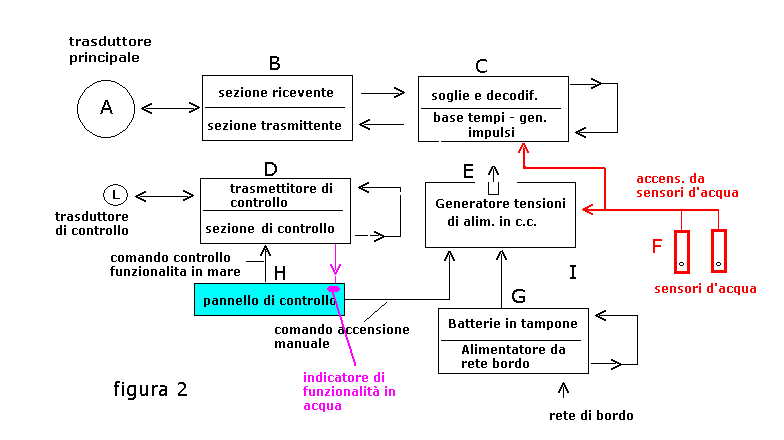
Il funzionamento del risponditore, illustrato nello schema blocchi di figura 2, è
qui descritto secondo la procedura di controllo della funzionalità generale e la
procedura operativa.
La procedura di controllo, con sommergibile in immersione, è la seguente:
Una volta acceso il risponditore dal pannello di controllo H l'operatore preme un apposito
pulsante ed avvia la procedura automatica per la verifica della funzionalità generale:
-il blocco D emette un impulso elettrico a frequenza f1 = 6150 Hz e durata to = 30 mSec.
che eccita il trasduttore L.
-il trasduttore L così comandato genera un impulso acustico che raggiunge, via mare,
il trasduttore principale A.
-il segnale elettrico dovuto all'impulso è posto all'ingresso della sezione ricevente B che lo
amplifica in banda prefissata.
-il segnale amplificato è inviato al circuito di soglia del blocco C che verifica le variabili che
caratterizzano l'impulso: "ampiezza" "frequenza" "durata"
-se le caratteristiche dell'impulso sono quelle volute l'impulso comanda, dopo un tempo
d'attesa stabilito, la sezione base tempi del blocco C dal quale parte il comando di
trasmissione per l'apposita sezione del blocco B.
-l'impulso elettrico generato dal trasmettitore alla frequenza di 6150 Hz eccita il trasduttore
principale A che emette il livello di pressione acustica voluto.
-detto impulso è ricevuto dal trasduttore L.
-le caratteristiche dell'impulso di L, tramite la sezione di controllo del blocco D, sono
verificate dando seguito all'accensione di un apposito indicatore luminoso posto sul pannello
di controllo H.
La procedura può essere ripetuta dall'operatore per le altre 2 frequenze operative, 8200 Hz; 10000 Hz.
La procedura operativa, con sommergibile in immersione, è la seguente:
Per la funzione d'emergenza, in caso di sensori d'acqua allagati, il blocco F accende automaticamente
il risponditore che resta in attesa d'impulsi di ricerca emessi da mezzi di soccorso.
Gli impulsi di ricerca, per una qualsiasi delle frequenze operative, seguono il percorso:
-il trasduttore A colpito dall'impulso di ricerca genera un impulso elettrico.
-il segnale elettrico dovuto all'impulso è posto all'ingresso della sezione ricevente B che lo
amplifica in banda prefissata.
-il segnale amplificato è inviato al circuito di soglia e durata facente parte del
blocco C per la verifica delle caratteristiche dell'impulso.
-se le caratteristiche dell'impulso sono quelle volute l'impulso comanda, dopo un tempo
d'attesa stabilito, la sezione base tempi del blocco C.
-dalla base tempi parte il comando di trasmissione per la sezione di trasmissione del blocco B.
-l'impulso elettrico generato dal trasmettitore, della durata to = 30 mSec. e alla frequenza
d'interrogazione eccita il trasduttore principale A che emette il
livello di pressione acustica voluto in "risposta all'impulso" del mezzo di soccorso.
L'apparato è dotato dell' alimentatore G con batterie in carica a tampone dalla sezione
alimentatore di rete di bordo.
Le batterie, se il risponditore è attivato, alimentano il blocco E che fornisce tutte
le tensioni necessarie al funzionamento dei blocchi di figura 2.
Altre diverse filosofie di funzionamento del risponditore possono essere attuate.
Il trasduttore principale "A" è del tipo con fissaggio in piano come mostra la figura 3
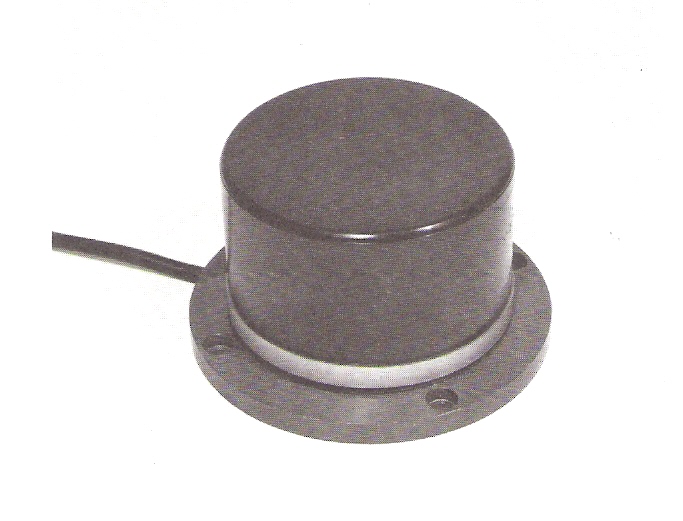 "figura 3"
"figura 3"
Il lobo di radiazione orizzontale è omnidirezionale.
Il lobo di radiazione nel piano verticale è mostrato in figura 4a:
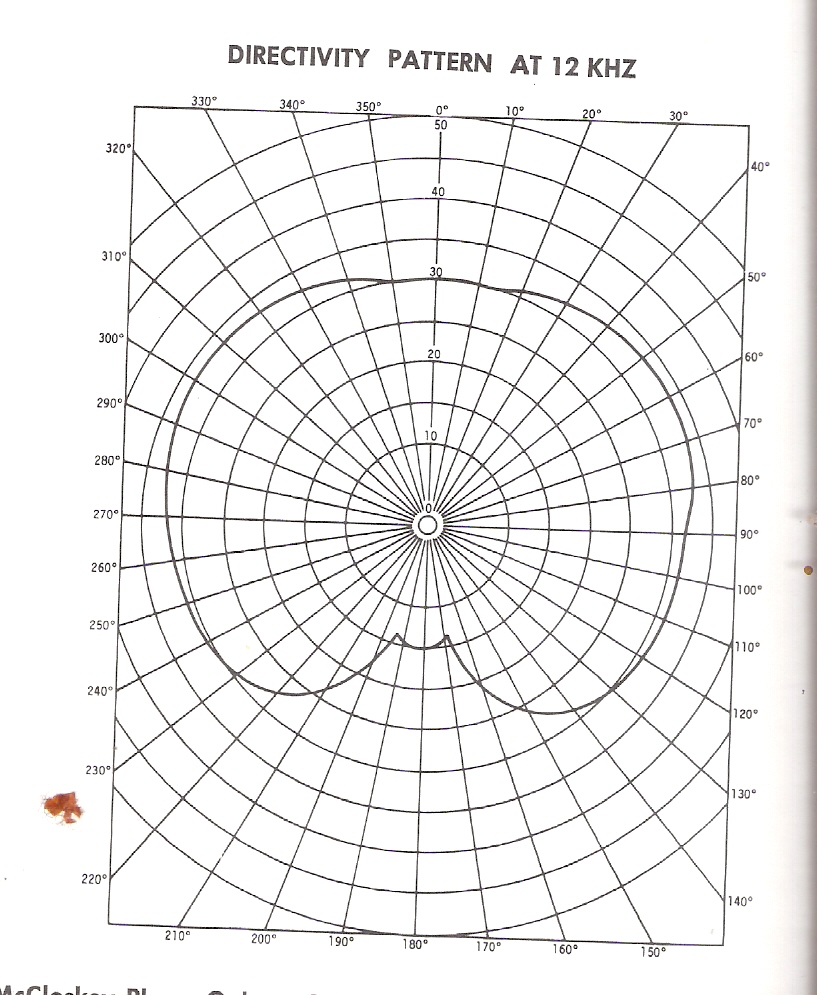 "figura 4a"
"figura 4a"
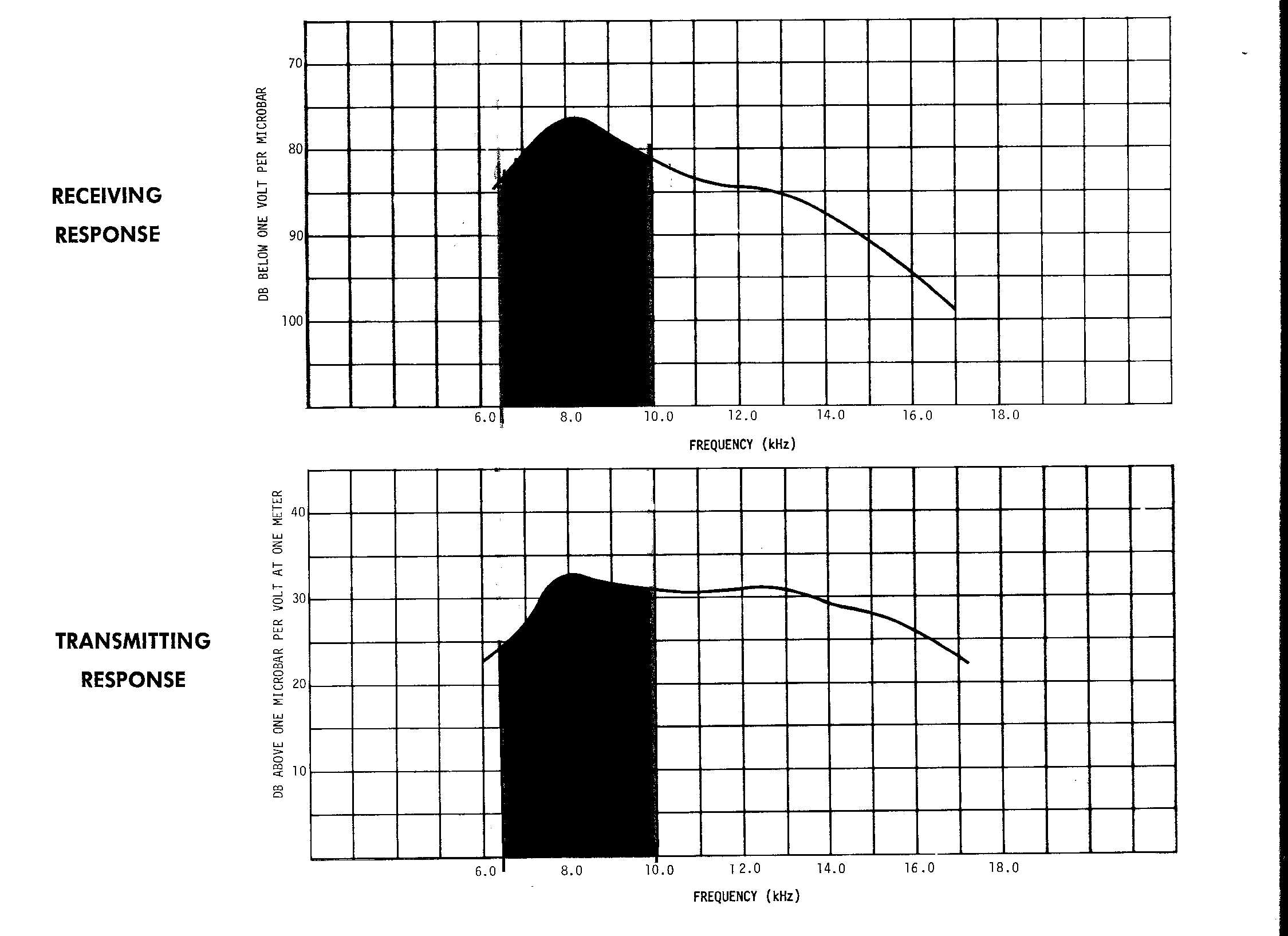
La sensibilità in ricezione e la risposta in trasmissione sono riportate in figura 4b; i diagrammi
mostrano che nell'intervallo di frequenze compreso tra f1 ed f3 le variazioni di livello
sono ancora accettabili ( notare che le pressioni sono espresse in μBar e non in μPa ).
 "figura 4b"
"figura 4b"
Il trasduttore di controllo "L" è mostrato in figura 5

Il lobo di radiazione è praticamente omnidirezionale nei due piani
Data la breve distanza tra il trasduttore principale e quello di controllo la sensibilità in
ricezione e la risposta in trasmissione di quest'ultimo sono irrilevanti ai fini delle prestazioni
del risponditore.
Dato per assunto che i segnali di ricerca dei mezzi di soccorso siano elevati perché,
generalmente, sono generati dai sonar operativi, non resta da stabilire a quale distanza massima
è possibile ricevere gli impulsi del risponditore ipotizzando che il sonar
preposto alla ricerca del sommergibile sinistrato lavori secondo le seguenti variabili:
a) frequenza di ricezione: per i calcoli si assume la frequenza f2 = 8200 Hz
b) banda di ricezione Bw = 1500 Hz
c) guadagno della base ricevente G = 10 dB
d) impostazione soglia per Priv = 99 % corrispondente a d = 64
e) soglia di rivelazione DT = 5 Log( d * BW / to) = 5 Log ( 64 * 1500 / 0.03 ) = 32.5 dB
f) il peggiore stato del mare: SS = 6 pari a NL = 55 μPa/Hz a 8200 Hz
L'equazione per il risponditore è così espressa dalla 1):
1) TL = LIr + DI - DT - NL
Il calcolo di TL è volto a stabilire la massima attenuazione sostenibile dell'impulso
emesso dal risponditore con le variabili indicate nell'equazione data.
- Maggiore sarà il valore di LIr (pressione acustica dell'impulso emesso dal risponditore) più elevata sarà la portata di scoperta
- Maggiore sarà il valore del DI (guadagno della base ricevente del sonar di ricerca) più elevata sarà la portata di scoperta
- Maggiore sarà il valore del NL (livello del rumore del mare) minore sarà la portata di scoperta
- Maggiore sarà il valore di DT ( soglia di rivelazione del sonar) minore sarà la portata di scoperta
Stabilita l'attenuazione massima che il sonar può accettare per la rivelazione degli impulsi del
risponditore, in base alle caratteristiche proprie e alle condizioni esterne, si deve impostare
una seconda equazione per il calcolo dell'attenuazione che il suono subisce nel tratto di mare,
di lunghezza R, tra il risponditore e il sonar.
Dato che l'attenuazione del suono in mare dipende, sia dalla divergenza dei raggi, sia dall'assorbimento
delle onde acustiche in funzione della frequenza della sorgente, questa dipendenza è espressa
dall'equazione:
2) TL = 60 dB + 10 Log R + α R
Il TL in questo caso esprime la variazione (per divergenza e assorbimento) della pressione dell'impulso
acustico emesso dal risponditore al variare della distanza R e del valore del coefficiente d'attenuazione α.
Nella 2) è ipotizzata la propagazione sferico-cilindrica; il primo addendo, indicato in 60 dB, tiene conto del fatto
che la variabile R è espressa in Km invece che in m.
Il secondo addendo è relativo all'attenuazione per divergenza per propagazione sferico-cilindrica , il terzo addendo, infine,
è relativo all'attenuazione per assorbimento in funzione di R e della frequenza ( tramite α).
Diversamente dalle procedure ordinarie di calcolo della portata di un sonar attivo la valutazione
della distanza massima "R" di scoperta del risponditore è subordinata alla potenza elettrica disponibile
sulle batterie in un ragionevole equilibrio tra la potenza stessa e la massimizzazione della durata
delle batterie che garantisce il funzionamento del risponditore per una maggiore durata nel tempo.
Da una attenta valutazione dell'equilibrio menzionato la disponibiltà di potenza acustica
è sta fissata nell'ordine di: LIr = 180 dB/μPa/Hz alla frequenza di 8200 Hz.
Con i dati e l'equazioni esposte nel paragrafo 5) procediamo al calcolo della portata del
risponditore per via grafico-numerica secondo le seguente procedura:
==Elenco dati:
F frequenza dell'impulso trasmesso dal risponditore f2 = 8200 Hz
LIr livello della pressione impulsiva emessa LIr = 180 dB/μPa/Hz
NL rumore del mare per ss = 6 : NL = 55 μPa/Hz a 8200 Hz
DI guadagno di direttività della base ricevente del sonar : DI = 10 dB
Propagazione s'ipotizza di operare con: propagazione sferico/cilindrica
DT il valore del differenziale di ric. del sonar: DT = 32.5 dB
α attenuazione per assorbimento a 8200 Hz : α = 0.7 dB/Km
==Calcolo di TL:
Con i dati impostati si applica l'equazione 1) ottenendo la massima attenuazione accettabile:
3) TL = LIr + DI - DT - NL = 180 dB + 10 dB - 32.5 dB - 55 dB = 102.5 dB
Dopo il calcolo del TL secondo la 3) si computa ora la variazione del TL in funzione della distanza
R e del coefficiente di assorbimento α secondo la 2) ottenendo la 4):
4) TL = 60 dB + 10 Log R + α R = 60 dB + 10 Log R + 0.7 R
A questo punto è tracciata in un sistema di assi cartesiani, posto R in ascisse e TL in ordinate,
la curva di TL secondo la 4) e la retta TL secondo la 3)
ottenendo il grafico riportato in figura 6:
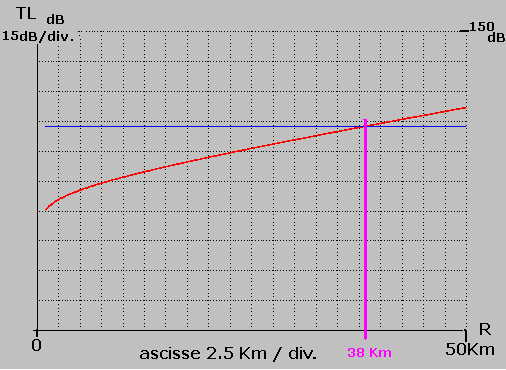 "figura 6"
"figura 6"
Naturalmente la portata del risponditore varia sensibilmente per le due frequenze di 6500 Hz e 10000 Hz,
sia a causa delle variazioni delle caratteristiche del trasduttore principale ( vedi figura 4b ),
sia per i diversi valori del coefficiente d'assorbimento "α" alle frequenze menzionate.
Il calcolo delle portate alle frequenze f1 ed f3 può essere svolto come esercizio di chiusura
di questa pagina.