SONAR-INFO-p108
IL DIFFERENZIALE DI RICONOSCIMENTO E LA SOGLIA -1-
1)Sulla definizione sintetica dei termini "Differenziale di Riconoscimento" e "Soglia" 2)Variazioni del "Differenziale di riconoscimento" 3)La formula di calcolo 4)Utilizzo della soglia 5)La misura del differenziale di riconoscimento di un rivelatore 6)Limitazioni nell'ottimizzazione del Δ 7)Chiusura
Due caratteristiche fondamentali del sonar
1.1) Il Differenziale di riconoscimento
Il Differenziale di Riconoscimento Δ, espresso in dB, è il minimo
rapporto S/N con il quale un sonar può rivelare la presenza del bersaglio mascherato dal rumore.
Secondo le convenzioni il differenziale di riconoscimento che caratterizza un rivelatore è il minimo valore Δ per il quale si abbia:
Probabilità di falso allarme P(FA) = 10 %
Probabilità di rivelazione P(D) = 50 %
1.2) La Soglia
La soglia è il mezzo, hardware o software, tramite il quale l'operatore al sonar può decidere il
livello oltre il quale i segnali e/o i rumori all'uscita del sistema di rivelazione possono
essere elaborati o visualizzati per la loro analisi e le decisioni conseguenti.
In fase di elaborazione dei segnali ricevuti dal sonar emerge sempre il conflitto tra ampiezza
dei segnali e i livelli dei rumori, dal rapporto S/N , misurato all'ingresso del rivelatore, dipende
la probabilità di scoprire (S) in presenza del rumore (N).
Il "Differenziale di Riconoscimento Δ", espresso in dB, è il minimo rapporto
S/N con il quale è possibile rivelare la presenza del bersaglio mascherato dal rumore secondo
criteri di probabilità, definiti da terne di variabili comprendenti Δ stesso, quali ad esempio
le seguenti computate, per un rivelatore in correlazione, per segnali in banda BW = 6000 Hz con
t = 1 Sec.:
A1) posto Δ (differenziale di riconoscimento) = -20 dB
se si accetta:
B1) P(FA) (percentuale di probabilità di falso allarme) = 10 %
si ha:
C1) P(D) (percentuale di probabilità di rivelazione) = 42%
A2) Δ = -15 dB
B2) P(FA) = 5 %
C2) P(D) = 36 %
A3) Δ = -12 dB
B3) P(FA) = 0.5 %
C3) P(D) = 17 %
Dato che P(FA), P(D), possono variare in dipendenza delle predisposizioni della soglia di
rivelazione del sonar, soltanto la terna: Δ = x dB; P(FA) = y % ; P(D) = z % definita secondo
la Specifica Tecnica imposta dal cliente al costruttore del sonar definisce il differenziale di
riconoscimento che deve essere oggetto di controllo;
ciò perché i valori di Δ frutto dei calcoli devono essere poi concretizzati
medianti strutture analogiche o numeriche che con le intrinseche dispersioni dei loro parametri
possono non consentirne la piena realizzazione.
In questo paragrafo accenniamo alla formula di calcolo che lega Δ, (espresso in dB), a P(FA) e P(D) senza
entrare nella sua complessa dimostrazione ; l'algoritmo è relativo ad un sistema di rivelazione
in correlazione:
Δ = 5 Log ( d BW / 2 t ) - 10 Log BW 1)
dove:
BW = larghezza di banda dei segnali e rumori all'ingresso del correlatore
t = tempo d'integrazione post correlazione
d = parametro funzione di P(FA) e P(D) secondo le curve ROC (si veda p80-p84)
Il computo del parametro (d) in funzione di Δ può essere sviluppato, quando necessario,
secondo l'espressione:
d = (10 ^ y) ( 2 t / BW ) 2)
dove :
il simbolo ^ indica l'elevamento a potenza
y = ( Δ + 10 Log BW ) / 5 3)
BW = larghezza di banda dei segnali e rumori all'ingresso del correlatore
t = tempo d'integrazione post correlazione
Con gli algoritmi indicati si possono controllare le terne riportate al paragrafo 2); una delle tre,
la prima ad esempio, si valuta secondo i seguenti passi:
1°) dichiarazioni: P(FA) = 10%; BW = 6000 Hz ; Δ = - 20 dB; t = 1 Sec.
2°) calcolo di y secondo la 3): Y = ( -20 + 10 Log 6000 ) / 5 = 3.55
3°) calcolo di (d) secondo la 2): d = (10 ^ 3.55) (2 /6000) = 1.2
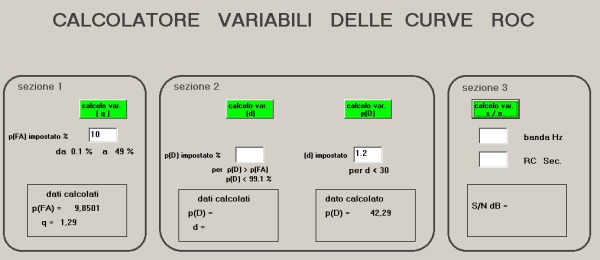
4°) calcolo di P(D) con l'ausilio dell'eseguibile di p80 (Calcolatore variabili delle curve ROC)
secondo l'impostazione:
Sezione 1 - inserire valore dichiarato di P(FA) = 10% e premere il pulsante verde.
Sezione 2 - inserire valore calcolato d = 1.2 e premere il pulsante verde;
nella finestra inferiore destra compare il valore del P(D) calcolato : P(D) = 42.29.
Quest'ultimo valore completa la terna del paragrafo 3 sotto riportata:
A1) Δ = -20 dB
B1) P(FA) = 10 %
C1) P(D) = 42%
La soglia di rivelazione del sonar consente all'operatore di stabilire quale
percentuale del P(FA) accettare per valori di Δ costanti.
La variazione della soglia , sempre a parità di Δ, provoca conseguenti modificazioni della
probabilità di rivelazione P(D).
Un esempio numerico per chiarire il concetto:
Sia dato un rivelatore in correlazione che lavori con le seguenti caratteristiche:
BW = 4000 Hz; t = 2 Sec. ; Δ = -20 dB
se l'operatore varia la soglia accettando, nel tempo, diversi valori della percentuale di falso
allarme P(FA) ottiene la conseguente variazione della probabilità di rivelazione P(D) secondo
la tabella:
Δ
P(FA)
P(D)
-20 dB
15 %
59 %
-20 dB
10 %
49 %
-20 dB
5 %
35 %
-20 dB
1 %
14 %
La tabella è compilata come segue:
1°) calcolo di y secondo la 3): Y = ( -20 + 10 Log 4000 ) / 5 = 3.2
2°) calcolo il valore di (d) secondo la 2): d = (10 ^ 3.2) (4 /4000) = 1.6
3°) computazione dei 4 diversi valori di P(D) per d = 1.6 costante e P(FA) variabile secondo i valori
di tabella utilizzando il calcolatore di P80.
Come si evince dalla tabella a mano a mano che l'operatore, mediante la regolazione della soglia,
riduce le probabilità di falso allarme accetta la penalizzazione di una conseguente riduzione
della probabilità di scoprire il bersaglio.
Secondo la definizione data al paragrafo 1) il differenziale di riconoscimento di un rivelatore
è espresso dalla terna Δ = x dB , P(FA) = 10 %, P(D) = 50%
E' chiaro che più sarà piccolo Δ migliore la capacità di discriminazione del rivelatore;
un rivelatore definito dalla terna Δ = -20 dB , P(FA) = 10 %, P(D) = 50% e migliore
di un altro caratterizzato dalla terna Δ = -16 dB , P(FA) = 10 %, P(D) = 50%.
Per la misurazione fisica della terna in oggetto, nelle fasi di collaudo del sonar, si possono
sviluppare sia circuiti elettronici, sia software adatto alla necessità; in questo paragrafo
faremo riferimento alla circuitazione elettronica illustrata in p5 - par. 4.6.2.4 perché meglio
si presta alla comprensione della metodologia di misura.
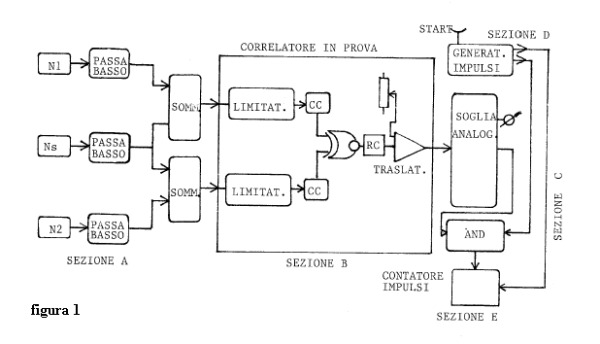
Il circuito, usato in passato per la misura del differenziale di riconoscimento di un rivelatore
in correlazione, è riportato in figura 1, in esso si osservano:
-sezione A: generatori di rumore N1 e N2; generatore di segnale idrofonico Ns
tre filtri per la definizione della banda di lavoro BW
due sommatori per la realizzazione del rapporto S/N = Δ
-sezione B: il correlatore in esame
-sezione C: circuito di soglia
-sezione D: generatore digitale d'impulsi
-sezione E: contatore digitale d'impulsi
Il metodo di misura con il circuito indicato è esposto chiaramente al paragrafo
4.6.2.5 del testo sulla correlazione disponibile in p5, testo di cui si consiglia
la lettura a complemento del tema trattato in questa breve pagina.
Se non ci fossero limitazioni fisiche e/o numeriche nella realizzazione di sistemi di rivelazione
dei segnali sonar si potrebbero realizzare rivelatori con Δ infinitamente piccolo.
Le limitazioni purtroppo sono presenti ed i valori realizzabili del Δ difficilmente possono
essere inferiori a - 20 dB ; -25 dB.
Le cause di questa difficoltà possono essere individuate in base al tipo di trattamento dei segnali:
-per il trattamento di tipo analogico giocano le dispersioni dei parametri dei diversi componenti
che costituiscono i circuiti di rivelazione; ad esempio un circuito integrato analogico deputato
a fornire l'uscita di un correlatore se ha un fuori zero di 10 mVcc non può certamente fornire livelli
di segnale inferiori a tale valore.
-per il trattamento di tipo numerico intervengono come fattori di limitazione: i circuiti di
conversione A/D, la definizione nella quantizzazione dei segnali in base ai bit di macchina, la campionatura
degli stessi e le ripetute degli spettri; notevole peso hanno anche le precisioni e le tipologie
degli algoritmi delegati all'elaborazione dei dati.
A chiusura della pagina riportiamo la copia, da p2-cap 12, di quanto scritto nel lontano 1992
in merito al differenziale di riconoscimento:
ciò, non per sottovalutare il trattamento numerico dei segnali sonar, utilizzato peraltro dallo
scrivente nel sonar FALCON con successo, ma per ricordare che la
caratteristica in oggetto deve, comunque sia realizzata, trovare riscontro, secondo specifica, sia in
sede di prove di laboratorio sia durante le prove del sonar in mare.
Il riscontro delle specifiche fu richiesto da MMI, ed eseguito dalle nostre Società nelle fasi di collaudo degli apparati
IP70 (con struttura totalmente analogica) e IPD70S (con struttura analogica e numerica).
E' naturale pertanto che per confrontare le prestazioni di nuovi sonar ai passati
IP70/PD70S si dovrebbero poter paragonare i rispettivi differenziali di riconoscimento misurati in
fase di collaudo.