SONAR-INFO-p52
SULLA RICEZIONE DELL'ECO SONAR IN PRESENZA DI RUMORE 1)Generalità 2)Caratteristiche e livelli del rumore casuale 3)Definizione delle grandezze di rumore 4)Il filtraggio pre-rivelazione 5)Caratteristiche dell'impulso di trasmissione 6)Il filtraggio post-rivelazione 7)L'effetto del rumore sulla rivelazione dell'eco 8)Conclusioni
In un sistema sonar attivo, la nave trasmittente invia un impulso di energia acustica che può
essere CW, FM, o pseudocaotico, e di qualsiasi frequenza e durata.
Questo segnale subisce distorsioni quando viaggia attraverso il mezzo,
viene riflesso dal bersaglio e torna alla nave che lo ha trasmesso.
Queste distorsioni possono provocare un'alterazione della frequenza Doppler
a causa di interferenze dovute a percorsi multipli dell'eco, ad alterazioni
della lunghezza dell'impulso e da echi multipli causati da interferenze o
aspetti del bersaglio, o qualsiasi combinazione di quanto sopra.
Inoltre, a causa dello stato del mare, il rumore dell'acqua in superficie,
il riverbero e il rumore dalle macchine proprie della nave, penalizzano il
segnale d' eco; a seguito di ciò la frequenza e l'ampiezza dell'eco
non sono più vere ed è impossibile prevederne di volta in volta le mutate
caratteristiche.
Nel prosieguo di questo lavoro esamineremo prima le caratteristiche del rumore
casuale che penalizza la ricezione dell'eco, successivamente le caratteristiche dell'eco e
dei filtri riceventi e in ultimo quali sono gli effetti che il rumore provoca sull'eco del bersaglio.
--NOTA-- Nel testo le radici quadrate di (x) sono espresse o con : RQ(x) o con (x)¹/²
La tensione di rumore misurata su un generico circuito di elaborazione del ricevitore sonar
è il valore efficace (RMSn) della sommatoria di tutte le componenti frequenziali del rumore stesso.
La massima ampiezza istantanea di un'onda sinusoidale è ± 1. 41 volte il valore efficace;
tuttavia, poiché il rumore casuale è costituito da diverse onde di tensione, il livello istantaneo di esso
può essere a volte maggiore di 1.41 RMSn e può avere polarità negativa o positiva.
Il valore medio del rumore casuale è zero poiché il valore medio di ciascuno dei suoi componenti
di rumore è pari a zero.
La probabilità che una tensione di rumore possa essere di qualsiasi ampiezza in qualsiasi istante
è legata al suo valore RMS.
Un diagramma dell' ampiezza del rumore (in termini di valore RMSn) contro la probabilità che si
verifichi una qualsiasi ampiezza viene mostrato in figura 1.
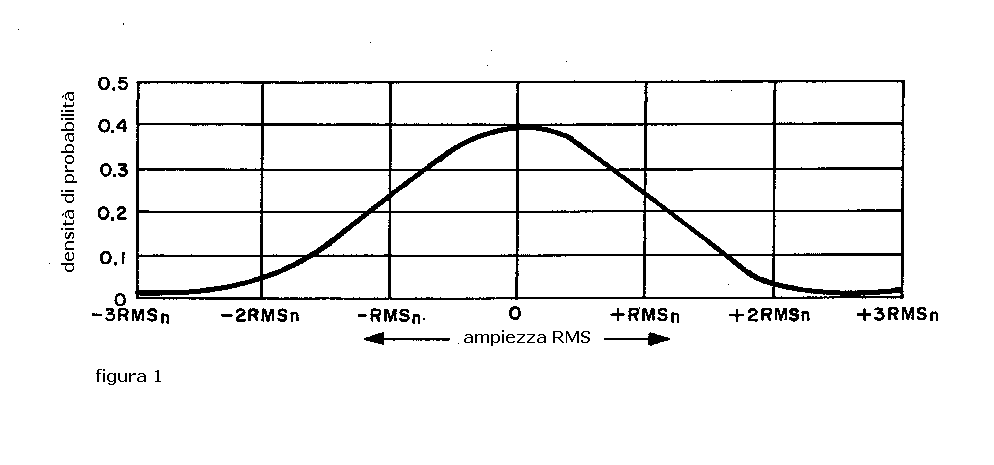
La curva risultante è conosciuta con diversi nomi, distribuzione normale, gaussiana, ecc.
Dalla curva si vede, per esempio, che la probabilità che il livello istantaneo del rumore possa
essere due volte il suo valore RMSn (sia positivo che negativo) è 0,054 o 5,4%,
così come la probabilità di avere un livello zero è maggiore: lo 0,4 o 40%.
Una forma più utile della curva di figura 1 è quella mostrata nella figura 2.
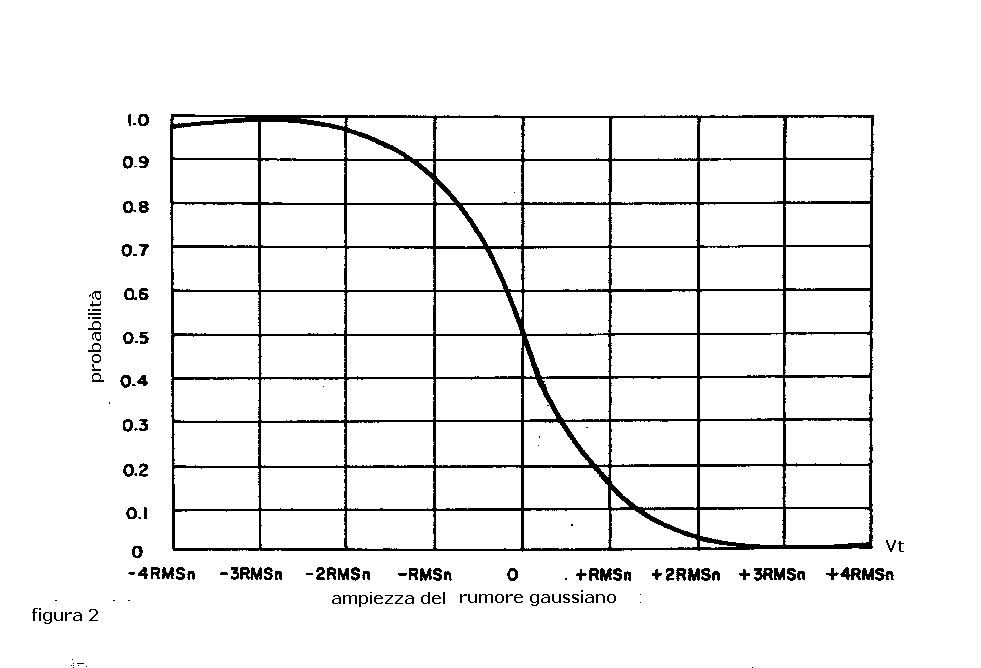
Questa curva fornisce direttamente la probabilità che la tensione di rumore istantanea superi
un valore di soglia determinato, indicato come ( Vt ) ; questa viene chiamata la probabilità di
distribuzione.
Ad esempio, la probabilità che in un istante il picco superi il doppio del valore RMSn del
rumore è 0,023.
L'utilità di figura 2 risulterà evidente quando si prenderanno in considerazione le probabilità
di falsi allarmi.
Nel sonar numerosi sono i metodi per variare il livello Vt della soglia nelle diverse condizioni
operative, o mediante azioni manuali o automatiche, tutte indirizzate ad aumentare la probabilità
di scoperta riducendo i falsi allarmi.
La forma della curva di distribuzione di probabilità (figura 2) rimane la stessa indipendentemente
da quale sia la larghezza di banda del rumore che può essere ricevuto.
Tuttavia il livello del rumore RMS è legato alla larghezza di banda del ricevitore.
Poiché lo spettro di frequenza viene considerato piatto (perché la risposta del ricevitore sonar
si assume perfettamente equalizzata) il livello RMS sarà legato solo
alla larghezza di banda e non alla frequenza centrale della stessa.
Poiché il rumore è casuale, i picchi delle varie componenti di esso non sono necessariamente
in fase e le tensioni di rumore, ciascuna definita nella propria banda, si sommano secondo
la radice quadrata della somma dei loro quadrati:
Vs = RQ( RMS1² + RMS2² +....+ RMSn²).
ad esempio:
se RMS1 = 2 mv , RMS2 = 5 mV , RMS3 = 0.5 mV si ha:
Vs = RQ( 2 mV² + 5 mV² + 0.5 mVn²) = 5.4 mV RMS.
Le potenze di rumore, ciascuna definita nella propria banda, sono espresse dalla
relazione:
Pn = RMS²
e si sommano invece linearmente:
Ps = Pn1 + Pn2 + Pn3
Ciascun dato di rumore è strettamente legato alla larghezza di banda che lo caratterizza,
in generale il valore RMS di un rumore, preso a campione, è espresso in valore spettrale,
cioè in banda Bw = 1Hz, con l'espressione : Vcamp = RMS / Hz¹/²
Secondo questa definizione si può calcolare il livello di rumore all'uscita di un filtro di banda
di larghezza Bw1 in base all'espressione:
Vnu = Vcamp RQ( Bw1 )
ad esempio: se Vcamp = 3 mV Hz¹/² e Bw1 = 1000 Hz si ha :
Vnu1 = 3 mV RQ( 1000 Hz ) = 94.8 mV RMS
Se il calcolo è ripetuto per una banda Bw1 = 3000 Hz si ha:
2) Vnu2 = 3 mV RQ( 3000 Hz ) = 164.3 mV RMS
Ora osservando che il rapporto Vn2/Vn1 = 164.3 / 94.8 = 1.73 corrisponde alla
radice quadrata del rapporto tra le due larghezze di banda:
RQ( 3000 Hz/1000 Hz ) = 1.73
si può passare a qualsiasi variazione di banda, da Bw1 a Bw2, con l'espressione:
V(Bw2) = V(Bw1)RQ(Bw2/Bw1)
3) ad esempio se un rumore ricevuto in banda Bw1= 7000 Hz è 15 mV RMS allargando la banda a
Bw2 = 14000 Hz il livello all'uscita del filtro sarà:
V(Bw2) = 15 mV RQ (14000 Hz/ 7000 Hz) = 21 mV RMS
Nella pratica corrente, per semplificare le operazioni di calcolo, le computazioni sopra
riportate sono eseguite in dB.
Con i dB si trasformano i prodotti in somme, le divisioni in differenze, le potenze, intere o frazionarie,
in prodotti.
Traducendo in dB le operazioni numeriche sopra sviluppate, posto V = 1 volt RMS, otteniamo:
-La Vcamp = RMS / Hz¹/² diventa:
Vcamp(dB) = dB/RMS/ Hz¹/²
-La Vnu1 = 3 mV RQ( 1000 Hz ) = 94.8 mV RMS diventa:
Vnu1(dB) = -50.46 dB / V + 10 Log 1000 = -50.46 dB / V + 30 dB = -20.46 dB / V
-La V(Bw2) = 15 mV RQ (14000 Hz/ 7000 Hz) = 21 mV RMS diventa:
V(Bw2)dB = -36.47 dB / V + 10 Log 14000 - 10 Log 7000 =
= - 36.47 dB / V + 41.46 dB - 38.45 dB = -33.46 dB / V
Poiché il segnale d'eco ricevuto occupa solo una banda di frequenza relativamente piccola,
il livello del rumore RMS può essere ridotto diminuendo la larghezza di banda fino a quando
è abbastanza ampia per consentire il passaggio dell'impulso d'eco.
La riduzione della banda è fatta solitamente da filtri passa-banda disposti nei circuiti preamplificatori.
Si tratta di filtri passa-banda in grado di limitare la banda di ricezione a solo quella quantità
necessaria per il transito dell'eco ricevuto più un incremento per lo spostamento Doppler.
Questo tipo di filtro è chiamato filtro di pre-rivelazione.
Poiché le componenti frequenziali del segnale si sommano linearmente, l'aumento della tensione
RMS del segnale desiderato è direttamente proporzionale all'aumento di banda, contrariamente
all'incremento del rumore che invece varia secondo la radice quadrata della banda.
L'aumento del livello del segnale, al variare della banda da Bw1 a Bw2, può essere espresso
in decibel con l'equazione:
RMS_s(dB) = SBw1(dB) + 20 log (Bw2 / Bw1)
mentre il livello di rumore RMS è dato dall'equazione:
RMS_n(dB) = NBw1(dB) + 10 log (Bw2 / Bw1)
Questo indica che vi è una larghezza di banda ottimale del filtro per ricevere un segnale di
frequenza nota, poiché una banda troppo ampia permette il passaggio di un ampio spettro
di rumore e una banda troppo piccola diminuisce l'energia dell'impulso d'eco.
Un filtro con tali caratteristiche viene indicato come "filtro adattato".
L'impulso trasmesso di solito dal sonar ha un profilo di modulazione rettangolare della durata
variabile da 5 millisecondi a 1 secondo, ed è di solito a frequenza costante.
L'intervallo di tempo tra impulsi è relativamente lungo e quindi ciascun impulso può essere
considerato non-periodico.
Il grafico di questo impulso, in figura 3, è una presentazione in quello che viene
chiamato il "dominio del tempo".
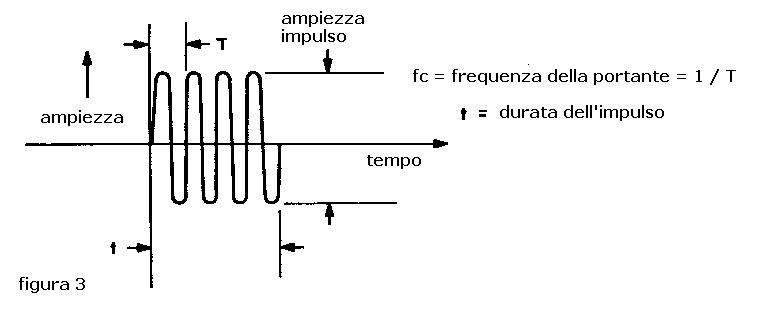
In cui l'asse verticale è la tensione (o pressione acustica) e l'asse orizzontale è il tempo.
La forma d'onda di figura 3 può essere rappresentata dal suo spettro di frequenza.
Tale spettro, tracciato in figura 4, è una presentazione nel "dominio della frequenza".
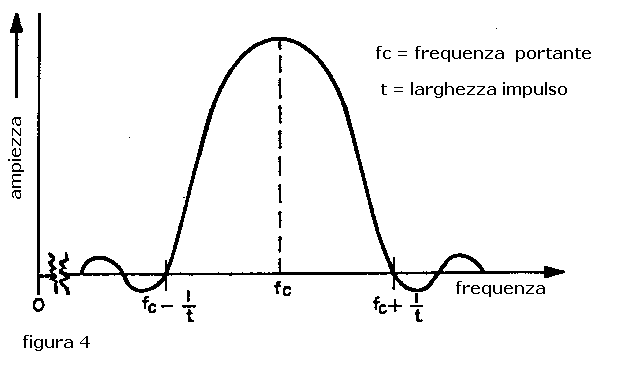
In questo caso l'asse verticale è di nuovo tensione o pressione sonora, ma l'asse orizzontale
è una misura di frequenza.
In questa forma l'impulso è rappresentato da un insieme continuo di frequenze centrato intorno
alla frequenza portante (fc).
La larghezza di questa banda di frequenze è inversamente proporzionale alla larghezza dell'impulso
trasmesso.
Impulsi molto stretti generano una banda larga, tale banda è richiesta al ricevitore.
In un sistema ricevente lo spostamento Doppler che può essere presente sul segnale ricevuto
richiede una banda più ampia di quanto sia necessario per il solo impulso trasmesso.
Si precisa che la banda passante del ricevitore deve accettare tutte le frequenze del segnale
ma non essere più ampia del necessario in modo da evitare inutili rumori da aggiungere
al segnale stesso.
Un filtro la cui risposta di frequenza corrisponde esattamente a quella del segnale desiderato
viene detto "filtro adattato".
Si può dimostrare che l'uscita di un filtro adattato darà un rapporto segnale/rumore maggiore
rispetto a filtri non adattati.
Facendo riferimento alla figura 4, si vede che lo spettro di frequenza dell'impulso trasmesso
(e quindi lo spettro di interesse in fase di ricezione) è quasi interamente contenuto in una
larghezza di banda pari a 2/t.
La banda del filtro di pre-rivelazione può essere, pertanto, espressa come segue:
Bw(pre) = 2/t
Per un impulso lungo la banda del ricevitore può essere molto stretta con una minimizzazione
del rumore.
Ad esempio, un impulso della lunghezza di 250 mSec. richiederebbe una larghezza di banda
di pre-rivelazione di: Bw(pre) = 2/ 250 mSec. = 8Hz
mentre per un impulso di 5 mSec. si avrebbe: Bw(pre) = 400 Hz.
L'aumento del livello di rumore RMS, a causa della variazione della larghezza di banda
da 8 a 400 Hz, sarebbe di:
RMSn = 10 Log (Bw2/Bw1) = 10 Log (400 / 8 ) = 17 dB
Pertanto, l'impulso da (250 mSec.) sarebbe 17 db più efficace dell'impulso breve da(5 mSec.).
Tuttavia, considerazioni pratiche, come il mantenimento della stabilità di frequenza e
l'annullamento del Doppler entro 8 Hz, e altri effetti come il riverbero, limitano la durata
massima dell'impulso che può essere utilizzato.
Poiché le informazioni trasportate dall'impulso ricevuto (Doppler escluso) sono contenute nella
sua forma piuttosto che nella sua frequenza portante , questa può essere eliminata raddrizzando e
filtrando senza alcuna perdita di informazione.
Questo processo di rivelazione avviene, generalmente, dopo il filtraggio passa banda dovuto al
ricevitore del sonar.
Il filtro passa banda (di pre-rivelazione) è generalmente più ampio dell'ottimale a causa
della necessità di acquisire l'effetto Doppler, la misura del quale richiede un processo diverso
da quello di seguito illustrato.
La combinazione dell'azione di questo filtro con l'effetto del filtro post-rivelazione portano
ad una struttura simile ad un filtro ottimale (filtro adattato).
Per forme d'impulso rettangolari un semplice filtro RC di post-rivelazione darà una buona
approssimazione alla risposta ottimale.
La larghezza di banda ottimale del filtro post-rivelazione è 1/2 della larghezza di banda del
filtro di pre-rivelazione; ciò perché la rivelazione trasla lo spettro
dell'impulso con il massimo a frequenza zero.
A causa della natura casuale di rumore c'è sempre una possibilità che questo superi il livello
di tensione stabilito dal valore Vt della soglia.
Aumentando il valore di soglia si riduce la probabilità che il rumore la superi però il sistema
ricevente riduce la probabilità di acquisire il segnale.
La probabilità citata, definita con la sigla (Pd), è la possibilità di rivelare
il segnale quando questo giunge al ricevitore.
La figura 5 mostra una curva che si riferisce alla Pd del ricevitore in funzione del
rapporto Segnale/Rumore (S/N) al suo ingresso.
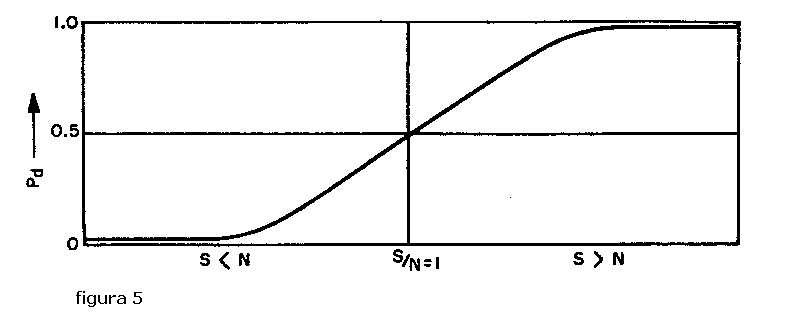
La curva, generalmente, è studiata prima o in concomitanza con il progetto del sonar.
Quando la soglia Vt si abbassa aumenta la probabilità di rivelazione Pd, così come aumentano
i falsi allarmi.
Un falso allarme è definito come l'evento che indica la presenza di un segnale quando in realtà
esso non è presente.
Falsi allarmi sono prodotti dai picchi di rumore che sono grandi abbastanza per superare un
prefissato valore di soglia Vt.
Con la sigla (FAR) s'indica la percentuale di falsi allarmi nell'unità di tempo.
Se si verificasse, per lungo tempo, il numero di volte che la tensione di rumore
(all'interno di uno spettro discreto) attraversa l'asse di ampiezza zero andando verso
il positivo si scoprirebbe che il numero degli attraversamenti sarebbe quasi sempre lo stesso.
Si può dire, pertanto, che il rumore casuale ha una frequenza equivalente fn.
Se il rumore supera molte volte la soglia Vt perchè e positivo rispetto allo zero il numero
di questi superamenti è prossimo alla frequenza fn.
Se si definisce con la sigla (Pfa) il numero di volte che il rumore supera la soglia Vt la
percentuale media dei falsi allarmi FAR è data da :
FAR = (Pfa)(fn)
dove:
FAR = tasso di falsi allarmi
Pfa = numero di volte che il rumore supera la soglia Vt
fn = frequenza equivalente del rumore
L'effetto del rumore che viene aggiunto a un segnale può essere tale che il segnale in
uscita dal rivelatore non raggiunga il massimo livello.
Pertanto, il rapporto segnale/rumore all'ingresso del ricevitore deve essere sufficiente
per assicurare che la probabilità che il segnale più il livello di rumore in uscita
sia maggiore della probabilità richiesta di rivelazione (Pd).
La distribuzione di probabilità della tensione d'uscita dal rivelatore in funzione del rapporto
S/N di ingresso può essere calcolata dalle caratteristiche del sistema.
Diminuendo la soglia Vt, il necessario rapporto di S/N per lo stesso Pd diminuisce, mentre il
tasso di falso allarme (FAR) aumenta.
Un metodo semplice per ridurre il numero di falsi allarmi è di esaminare due eco prima di
prendere una decisione.
La probabilità di rivelare un segnale due volte nello stesso posto non è elevata, ma la probabilità
di due falsi allarmi che si verifichino nello stesso luogo è molto bassa.
Supponiamo ad esempio che sia:
Pd = 0.99, Pfa = 0.01 e fn = 10/Sec.
il tasso di falsi allarmi è pari a:
-per un singolo impulso : FAR = 0.01 (1O) = O.l / Sec. o 1 ogni 10 secondi.
-per due impulsi, Pd diventa (0,99)(0,99) = 0.98 mentre:
FAR = 0,01 (0,01) (lO) = 0.001 / Sec. = 0.001 o 1 ogni 1000 secondi.
Pertanto, con due impulsi, la probabilità che un falso allarme si verifichi due volte nello stesso
luogo è molto minore della probabilità di rivelare un segnale.
Il segnale d'eco ricevuto da un sonar attivo è contaminato dal rumore casuale
distribuito in ampiezza.
Cioè, le ampiezze dei rumori acustici in qualsiasi istante nel tempo saranno correlati
al loro livello RMS secondo una curva di probabilità.
Dal binomio dei filtri di pre-rivelazione e post-rivelazione questo rumore viene ridotto,
in modo da migliorare il rapporto segnale/rumore.
Altri fattori coinvolti sono la probabilità di rivelazione di un segnale e la presenza
dei falsi allarmi.
A causa della natura del rumore casuale c'è sempre una reale possibilità che picchi di
rumore superino un determinato livello di tensione (soglia Vt).
La probabilità del falso allarme può essere ridotta aumentando la soglia
anche se a scapito della sensibilità del ricevitore, ossia della probabilità di scoperta.